BXI Control App 使用指南
BXI Control 是配套 BXI 机器人使用的专业遥控应用程序,支持 Android 和 Windows 平台。用户可通过 WiFi 或蓝牙连接机器人,进行实时远程控制、视频监控、遥测数据查看及固件升级等操作。
重要提示
强烈建议仅在室内稳定 WiFi 环境下使用控制 APP,避免在非 WiFi 环境下使用。平板蓝牙信号较弱,容易断连导致失控。
- 下载链接:点击跳转下载站
界面总览
应用底部有两个主导航标签页:
| 标签 | 说明 |
|---|---|
| 控制 | 机器人连接入口(核心功能) |
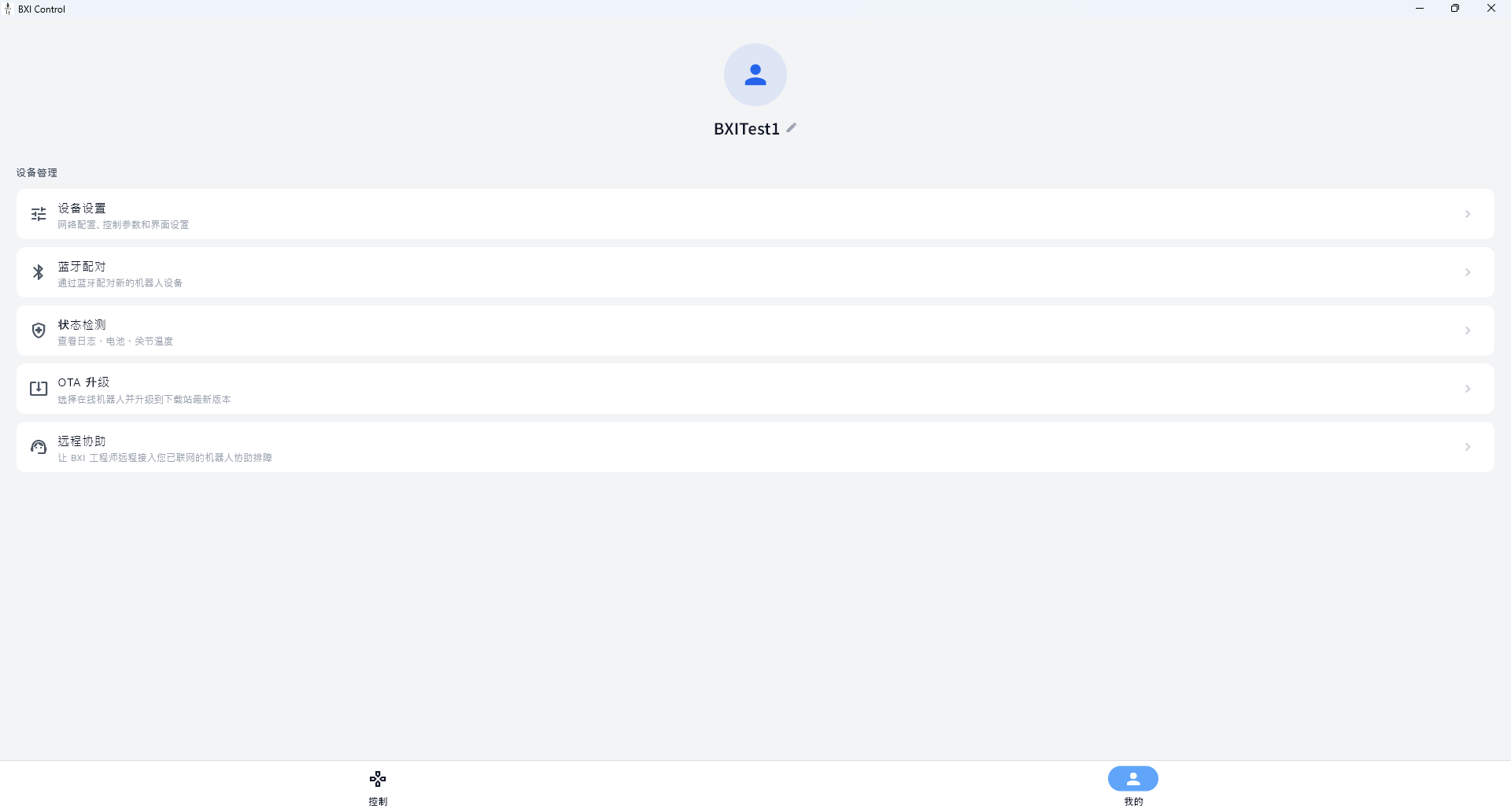
| 我的 | 用户信息、设置、诊断与固件升级 |
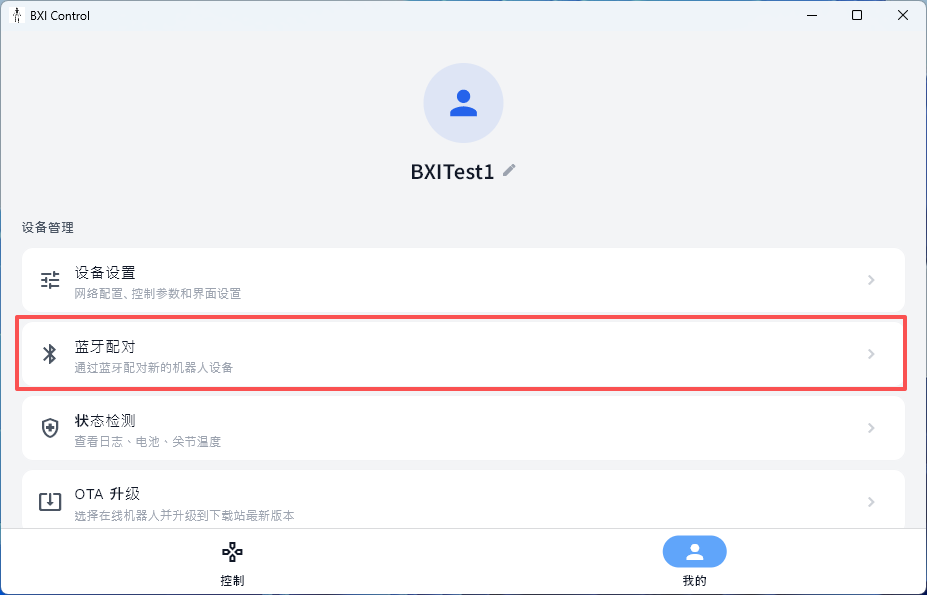
连接机器人
首次使用需要先通过"我的"页面完成蓝牙配对,将机器人接入 WiFi 网络。配对完成后,日常使用直接在"控制"页面以 WiFi 或蓝牙方式连接即可。
首次配对(蓝牙配网)
首次连接机器人时,需通过蓝牙将 WiFi 凭据发送给机器人,使其接入局域网。
入口: 底部 "我的" 标签页 → 蓝牙配对
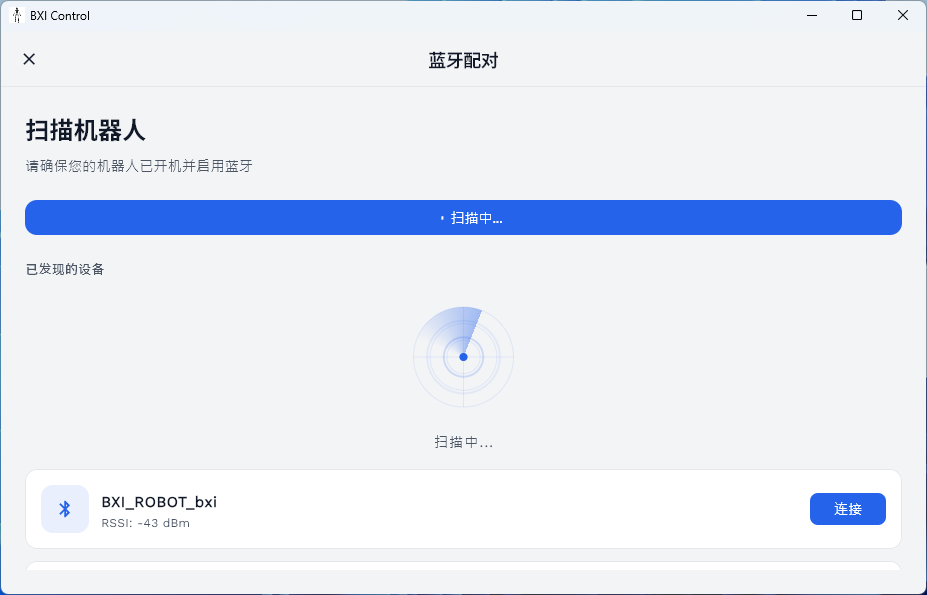
操作步骤:
-
进入蓝牙配对页面,点击 "扫描蓝牙设备",等待发现附近的机器人。
-
在列表中找到目标机器人,点击 "连接",等待蓝牙连接建立。
-
连接成功后,页面显示 WiFi 配置表单:
- 网络名称(SSID):从下拉列表选择(应用会自动填入手机当前连接的 WiFi),或手动输入;
- 密码:填写对应 WiFi 密码。
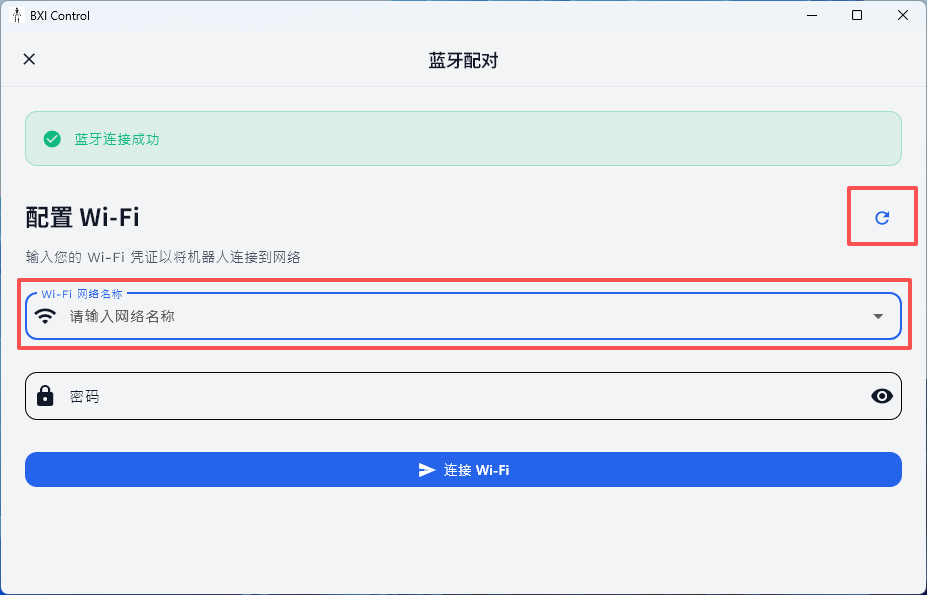
-
点击 "连接到 Wi-Fi",机器人将通过蓝牙接收凭据并自动连接 WiFi。
-
配置成功后,页面显示机器人的 IP 地址,设备自动保存至历史列表。
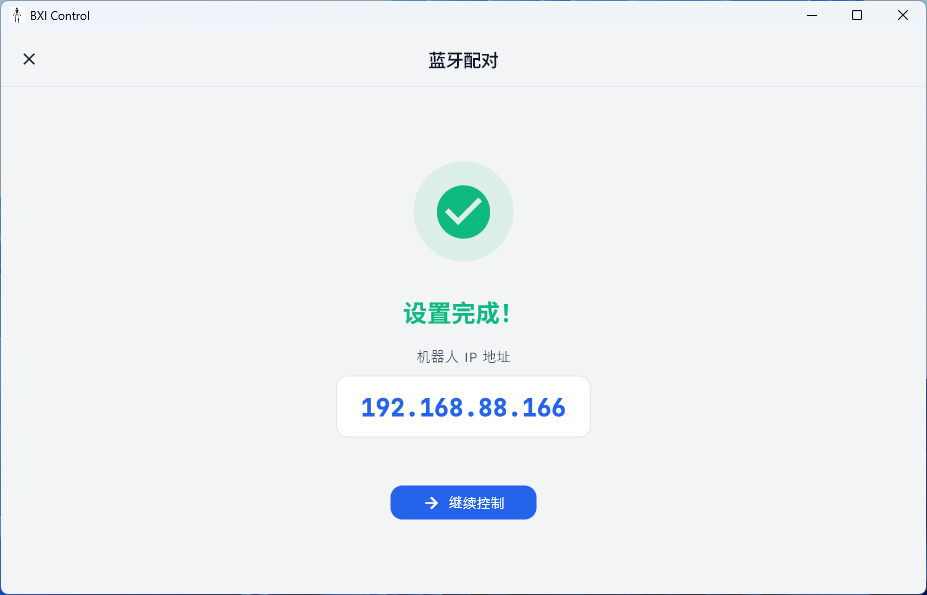
-
点击 "继续到控制" 即进入控制界面。
后续连接无需重复配对
完成一次蓝牙配网后,设备 IP 会保存在历史列表中,之后直接在"控制"页面点击连接即可。
WiFi 连接(日常使用)
配对完成后,确保手机/PC 与机器人处于同一局域网,即可通过 WiFi 连接。WiFi 模式支持实时视频和遥测数据。
入口: 底部 "控制" 标签页(默认为 WiFi 模式)
操作步骤:
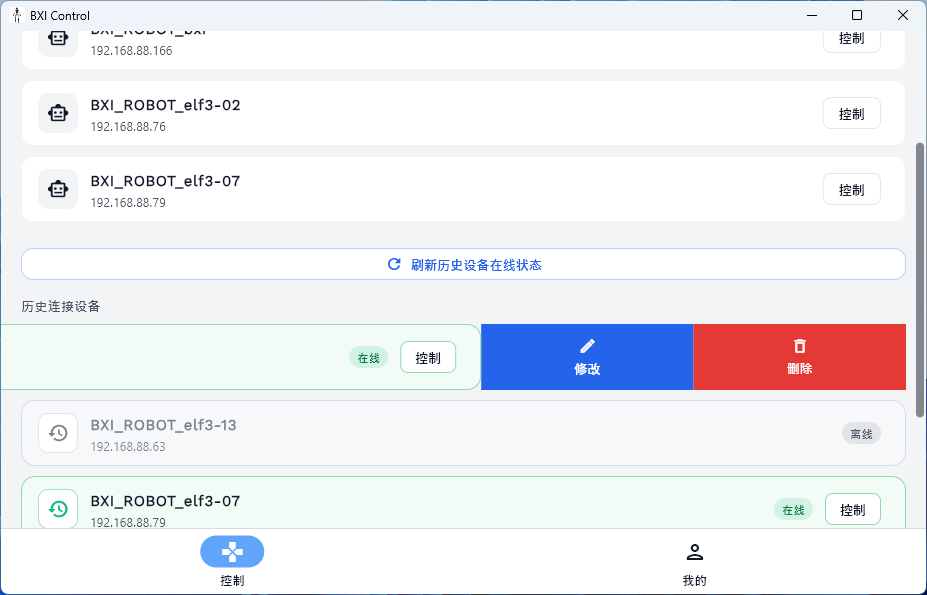
- 进入"控制"页面,点击 "扫描局域网" 按钮,发现在线机器人;或直接在"历史连接设备"中查看已保存设备的在线状态。
- 在设备列表中点击目标机器人右侧的 "控制" 按钮,进入控制界面。

设备离线排查
如果设备未出现或显示离线,请检查机器人是否已开机并成功接入 WiFi,以及手机/PC 与机器人是否在同一网段。
手动编辑设备 IP:
在历史设备列表中,左滑设备条目可出现编辑和删除操作;长按也可弹出编辑菜单修改 IP 地址。
一般无需手动修改
应用会自动更新设备 IP,通常无需手动操作。仅在自动更新失效或网络环境特殊时,才需要手动修改。
蓝牙直连(无需 WiFi)
蓝牙模式下无需局域网,适合在无 WiFi 环境下操控机器人,但不支持视频流和遥测数据。
入口: 底部 "控制" 标签页 → 切换为 蓝牙模式
操作步骤:
- 点击"控制"页右上角切换为蓝牙模式。
- 点击 "扫描蓝牙设备",找到目标机器人后点击 "控制",自动建立蓝牙连接并进入控制界面。

蓝牙模式限制
蓝牙连接仅支持发送运动控制指令,不支持视频流和实时遥测数据。如需查看机器人视角画面,请使用 WiFi 模式。
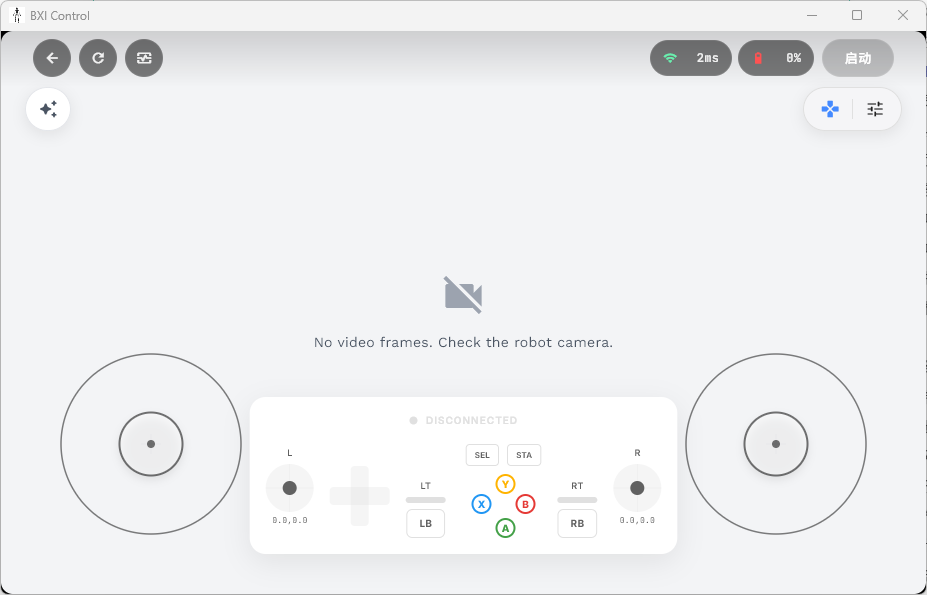
控制界面
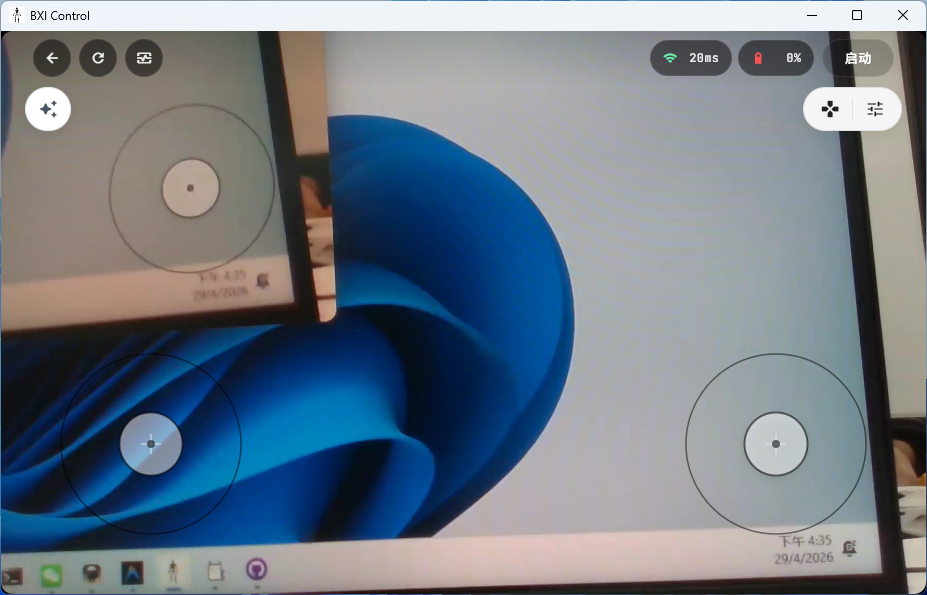
连接成功后进入全屏横屏控制界面,主要区域如下:
界面区域说明
| 区域 | 位置 | 功能 |
|---|---|---|
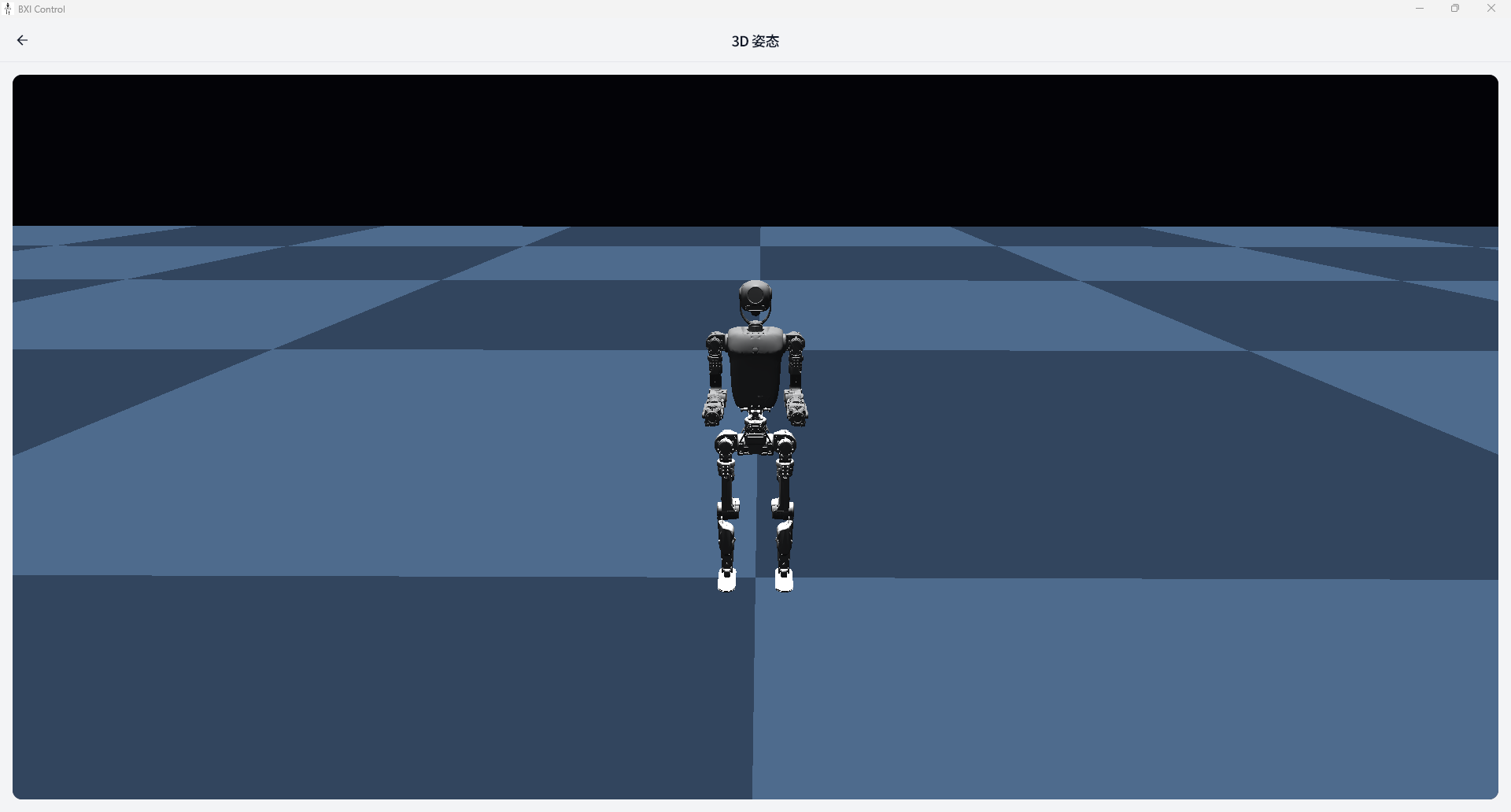
| 主视图 | 屏幕中央 | WiFi 模式下显示实时视频,或切换为 3D 机器人姿态视图;蓝牙模式下为空白占位 |
| 副视图 | 右下角浮窗 | WiFi 模式下可显示 3D 姿态视图或视频,点击浮窗互换主副;蓝牙模式下不可用 |
| 左虚拟摇杆 | 左下角 | 控制机器人前进/后退/左移/右移 |
| 右虚拟摇杆 | 右下角 | 控制机器人转向/高度 |
| 左功能岛 | 左侧中部 | 快捷操作菜单、预设动作菜单、3D 视图切换 |
| 右功能岛 | 右侧中部 | 遥测数据开关、手柄叠加层开关、快捷设置入口 |
| 顶部状态栏左侧 | 屏幕顶部左 | 返回、刷新视频、诊断入口 |
| 顶部状态栏右侧 | 屏幕顶部右 | 信号质量、电池电量、启动/停止 |
顶部状态栏
左侧:
- 返回:退出控制界面
- 刷新视频:重新建立 WebRTC 视频连接
- 诊断入口:快速跳转至状态检测页面(仅 WiFi 模式下显示)
快速诊断入口说明
此入口等同于从"我的" → 状态检测进入,但会自动将 DOMAIN_ID 设置为 22(App 控制程序专属域),无需手动选择,方便快速查看当前控制会话的机器人状态。
右侧:
- 信号质量:WiFi 模式显示 RTT(ms),蓝牙模式显示 RSSI(dBm),颜色随质量变化(绿/黄/红)
- 电池电量:机器人电池百分比,颜色随电量变化
- 启动 / 停止:向机器人下发启动或停止控制程序指令
启动/停止注意事项
- 发送后系统等待机器人响应最长 35 秒,超时会弹出提示;
- 指令之间有冷却保护,防止误触重复发送;
- 停止后机器人电机将失能,操作前请确保机器人处于安全姿态。
左功能岛
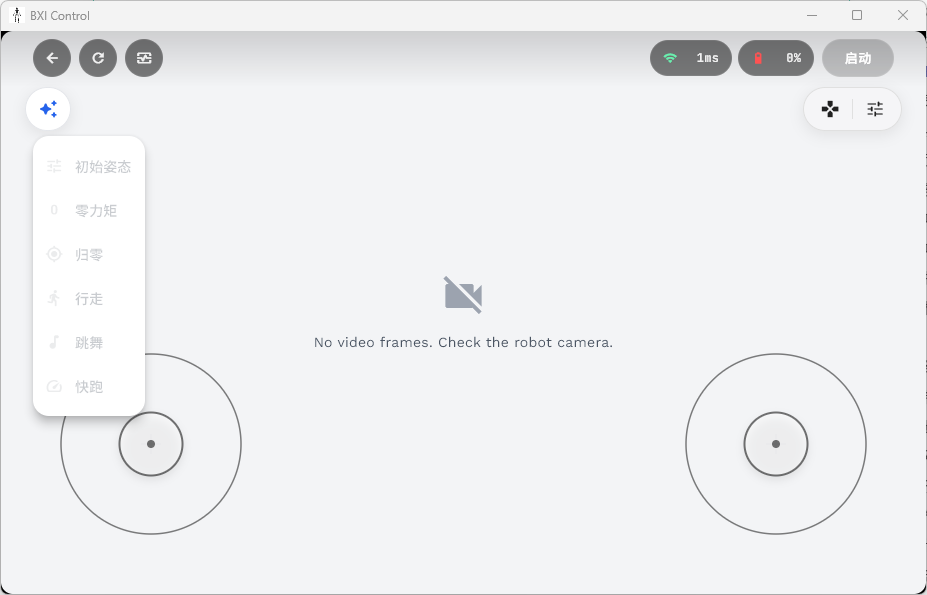
- 预设动作菜单:列出可用预设动作,激活时按钮高亮;同一时间只能激活一个
- 3D 视图切换:切换主视图为 3D 机器人姿态视图(仅 WiFi 模式)
右功能岛
- 手柄叠加层按钮:显示/隐藏手柄输入状态悬浮窗,实时查看各轴和按键状态
- 快捷设置按钮:快速进入设置界面
虚拟摇杆操作
- 左摇杆:控制机器人平移运动(前/后/左/右)
- 右摇杆:控制旋转(左转/右转)和高度升降
左右手模式:可在设置 → 控制中切换左右手布局,适应不同操控习惯。
键盘支持(PC 端)
在 Windows 版本中,也可使用键盘控制: - W / S:前进 / 后退 - A / D:左移 / 右移 - 方向键 ← / →:左转 / 右转 - 方向键 ↑ / ↓:升高 / 降低
手柄操控
连接外部手柄(USB / 蓝牙游戏手柄)后,应用自动识别并启用手柄输入,以 30 Hz 频率发送指令,响应更流畅。
主要映射关系(默认):
| 输入 | 功能 |
|---|---|
| 左摇杆上下/左右 | 前后平移 / 左右平移 |
| 右摇杆左右 | 旋转 |
| 右摇杆上下 | 高度升降 |
LB / RB 组合键 | 配合其他按键触发功能切换 |
左右手模式:可在设置 → 控制中切换手柄的左右手握持布局。
设置
通过 "我的" 标签页 → 设备设置 进入设置界面。
网络
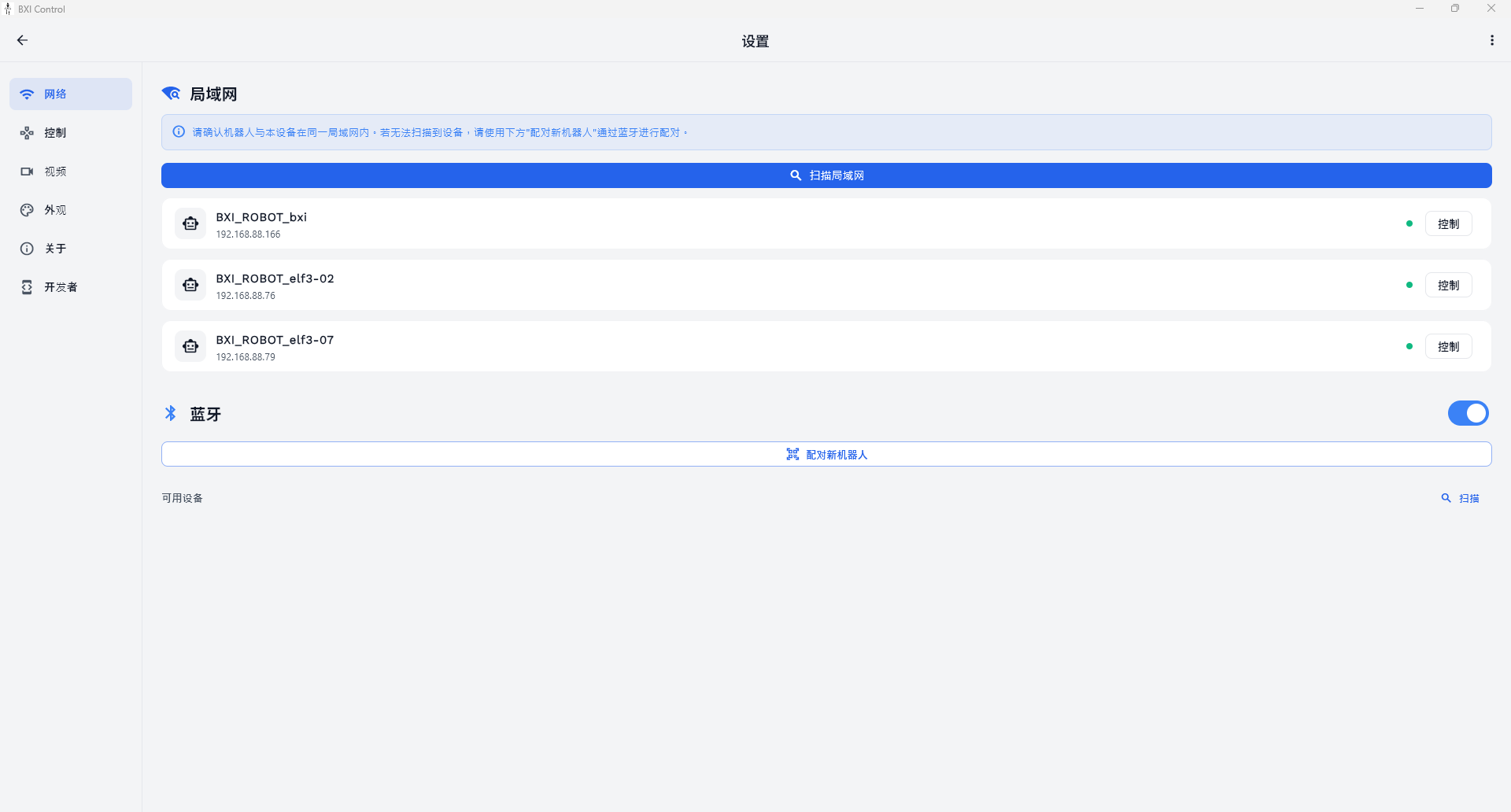
| 参数 | 说明 |
|---|---|
| 局域网扫描 | 扫描同网段内的在线机器人设备 |
| 蓝牙开关 | 开启/关闭蓝牙功能 |
| 配对新机器人 | 跳转蓝牙配对流程,为机器人配置 WiFi |
控制
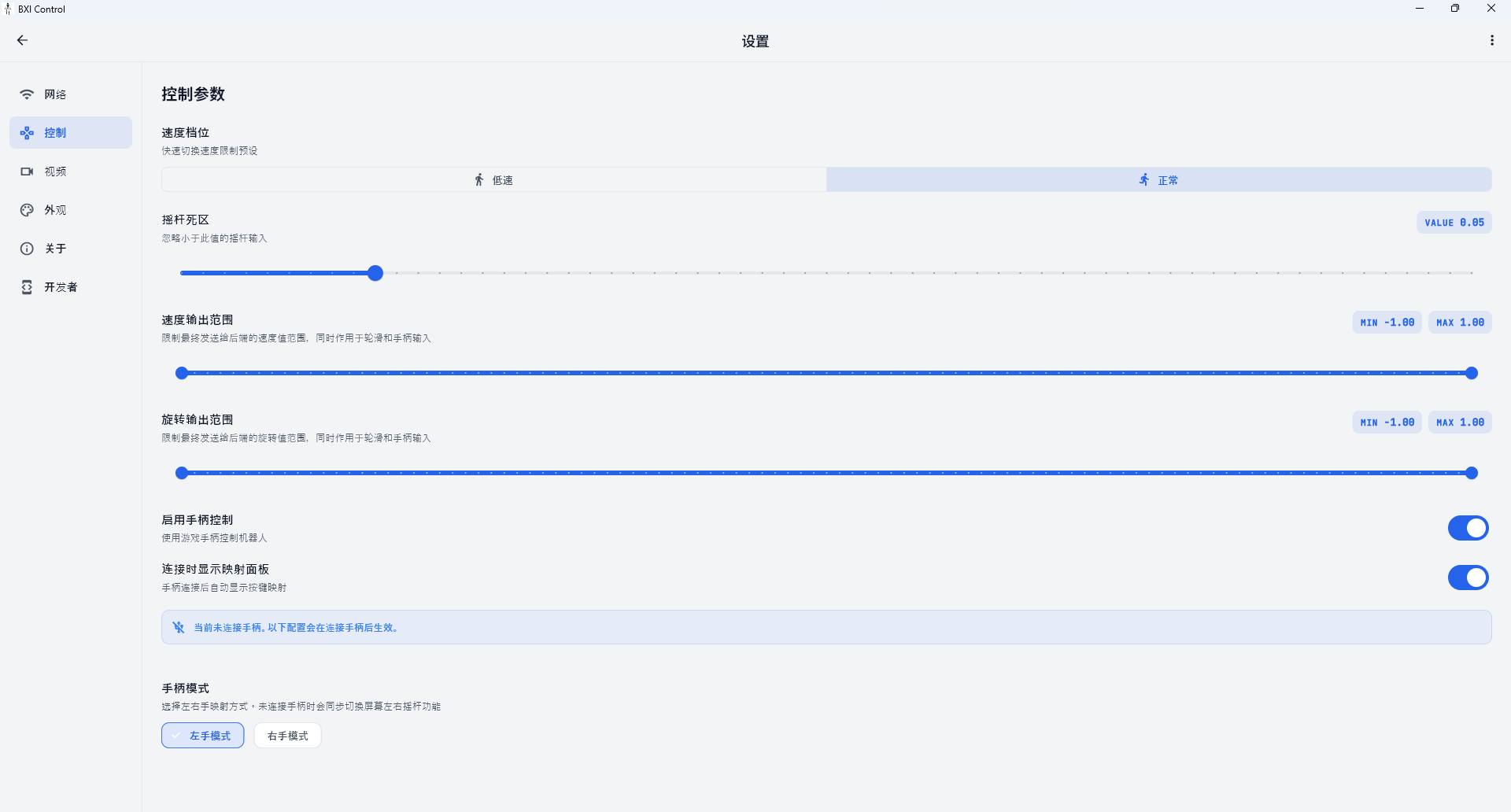
| 参数 | 说明 |
|---|---|
| 速度档位 | 切换行走速度档(走 / 跑) |
| 摇杆死区 | 摇杆中心不响应区域大小(0.00~0.30),防止漂移 |
| 输出速度范围 | 平移速度输出的最小/最大值限制 |
| 输出旋转范围 | 旋转速度输出的最小/最大值限制 |
| 启用游戏手柄 | 开启/关闭外接手柄输入 |
| 显示手柄叠加层 | 控制界面是否显示手柄输入状态悬浮窗 |
| 手柄握持模式 | 切换左手 / 右手握持布局 |
| 扇形档位 | 手柄摇杆的方向吸附模式(标准 20° / 宽松 32°),右手模式下可用 |
视频
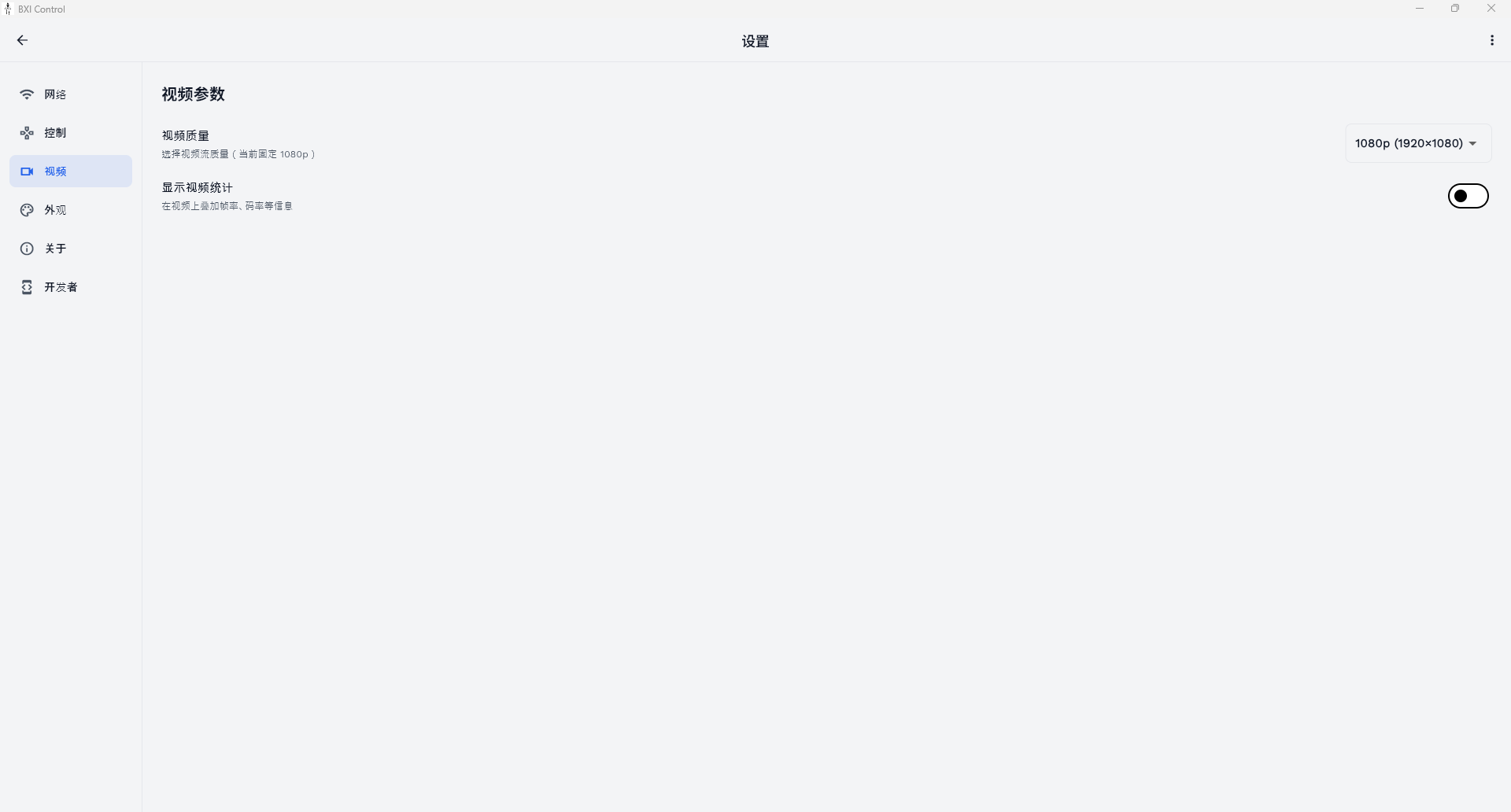
| 参数 | 说明 |
|---|---|
| 视频质量 | 选择视频流分辨率(1080p) |
| 显示视频统计 | 是否在控制界面叠加显示码率/帧率数据 |
外观
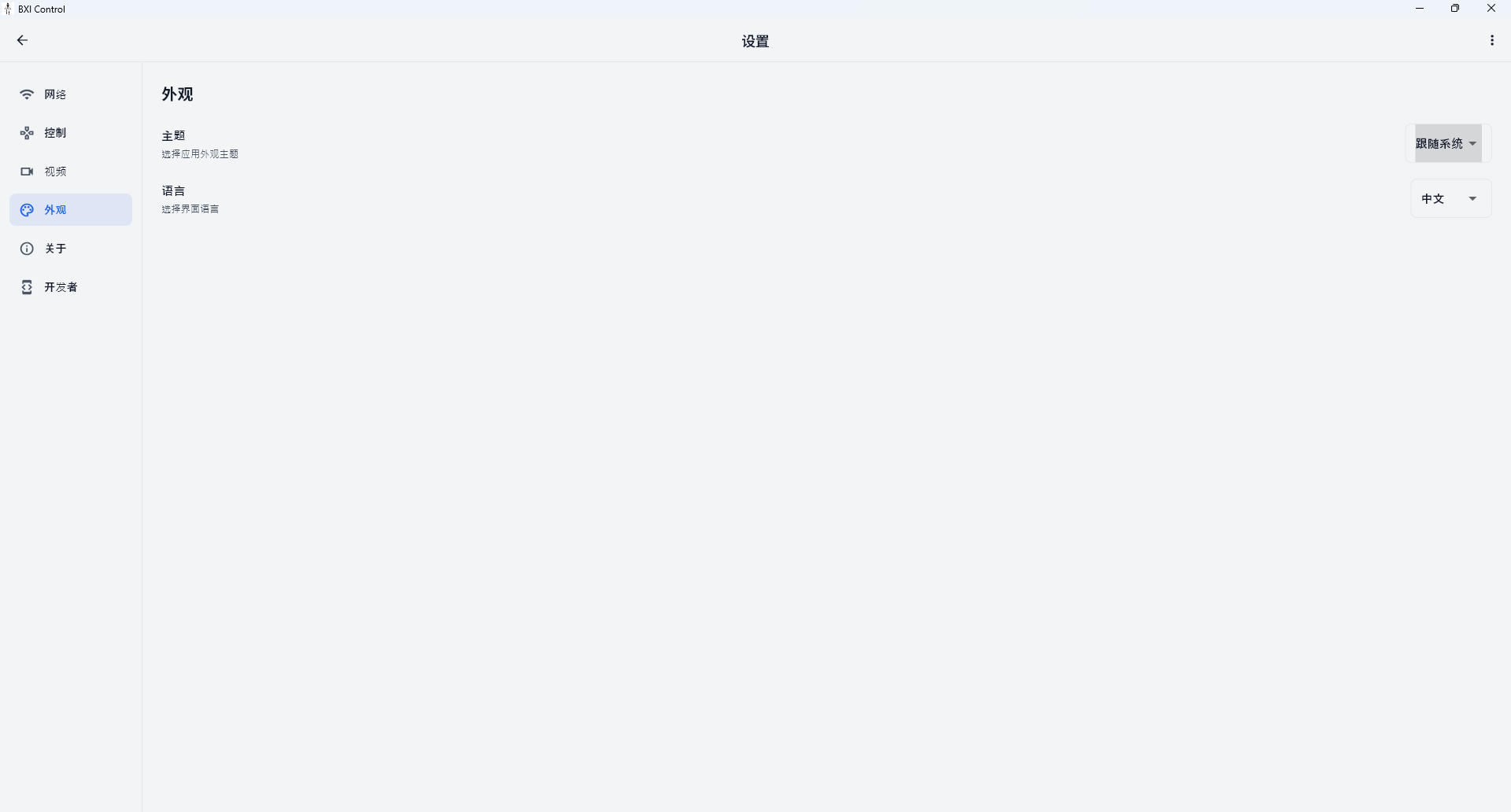
| 参数 | 说明 |
|---|---|
| 主题 | 切换应用配色方案(跟随系统 / 浅色 / 深色) |
| 语言 | 切换界面语言(中文 / English) |
关于
显示应用版本号、版权信息及隐私政策入口,支持一键检查更新。
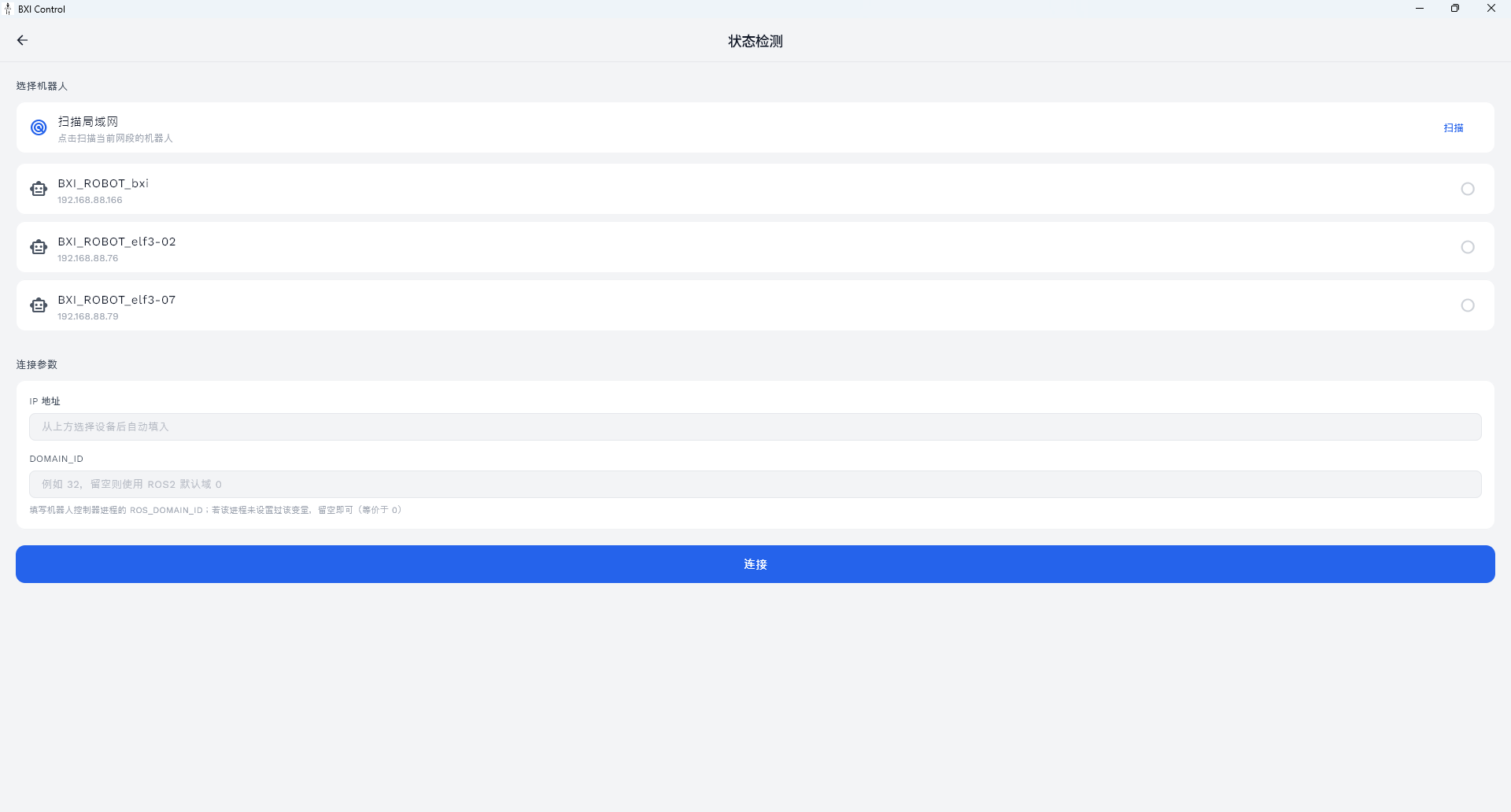
状态诊断
在 "我的" 标签页中,点击 "状态检测" 进入诊断界面。进入后需先扫描局域网选择目标机器人并确认 DOMAIN_ID,随后进入包含以下五个诊断项目的菜单:
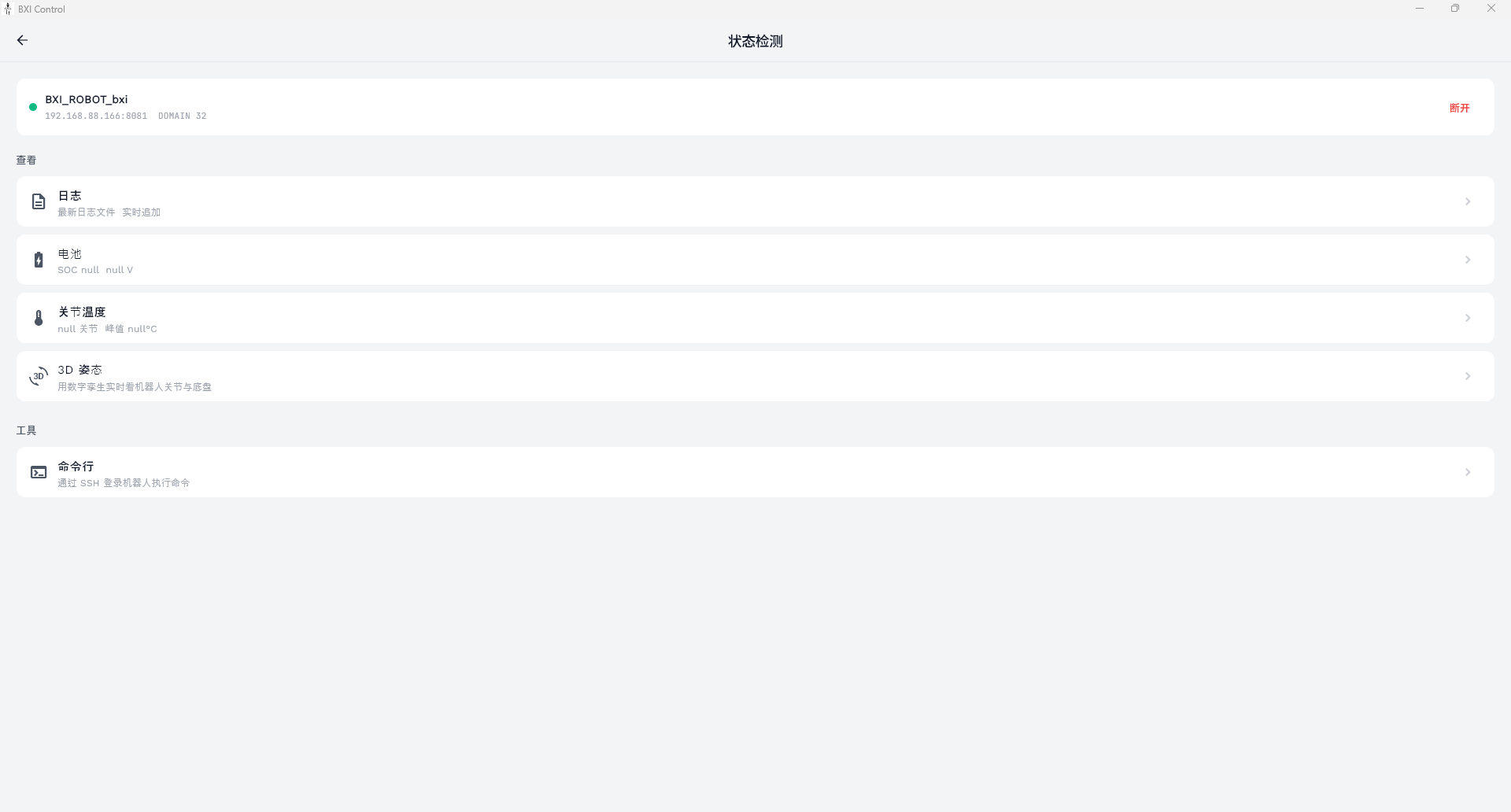
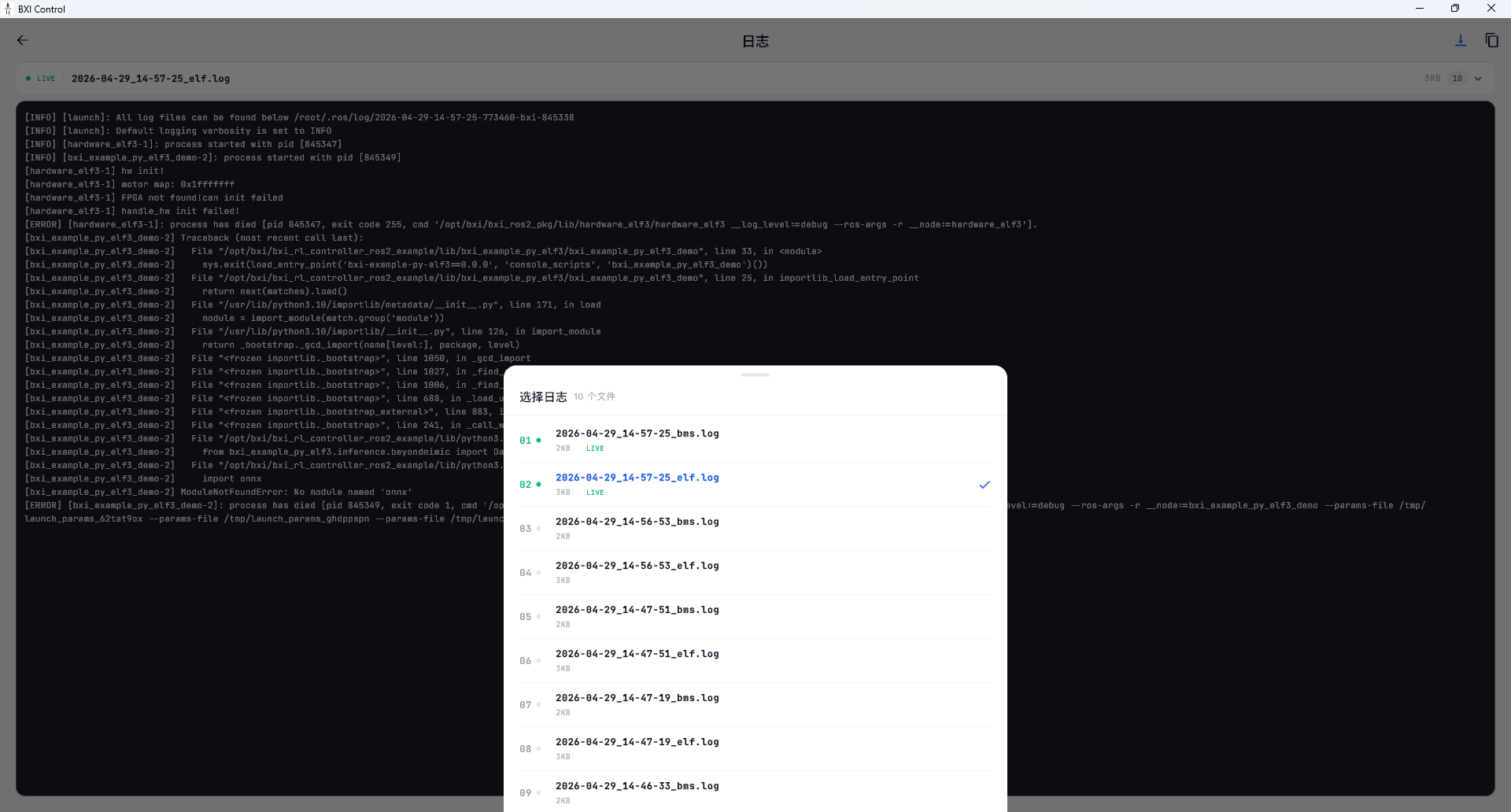
日志
查看机器人最新日志文件,实时追加更新。
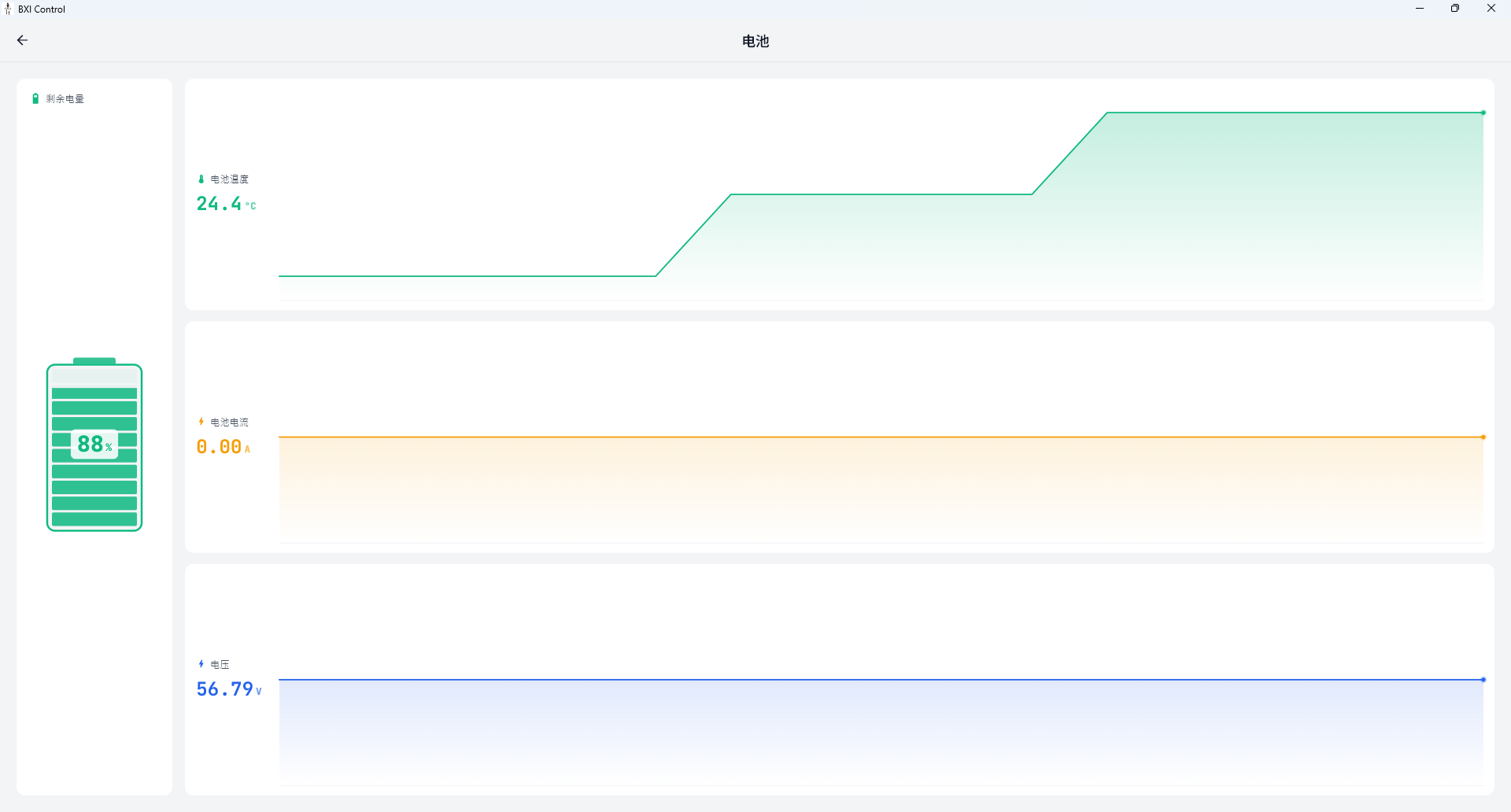
电池
实时显示电池 SOC 百分比、电压、电流、温度,并以折线图展示历史趋势。
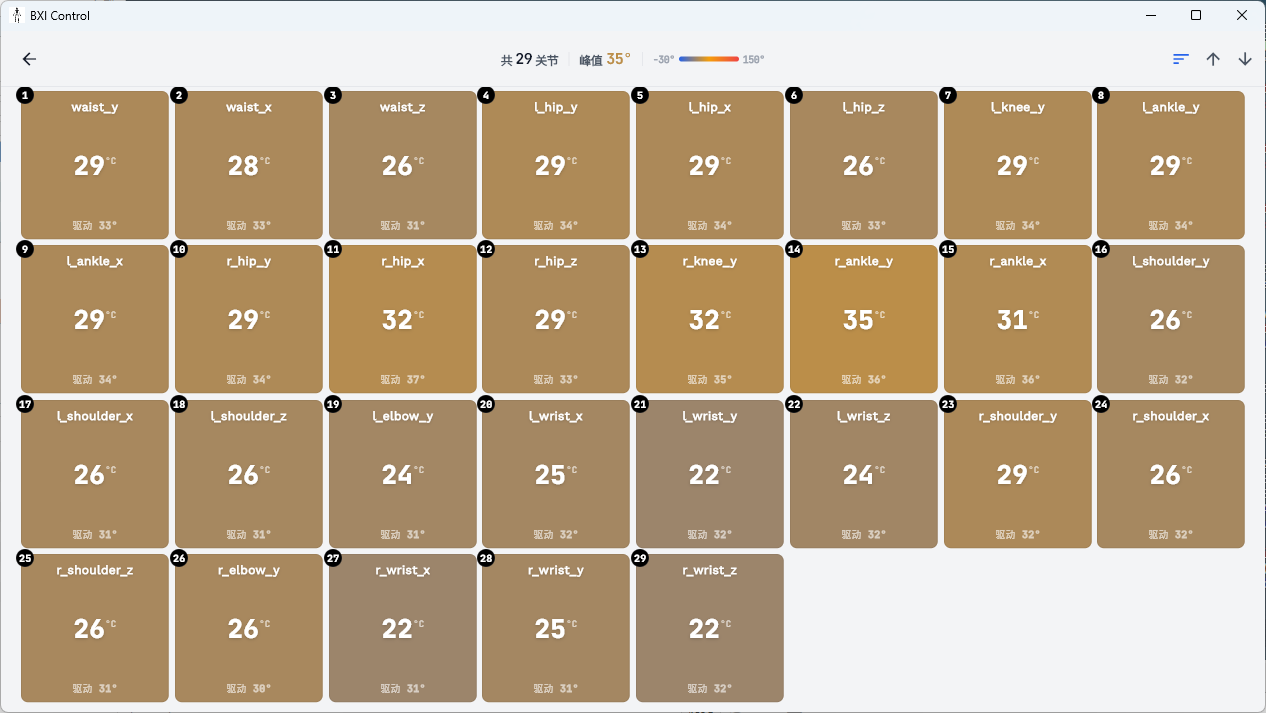
关节温度
实时显示各关节电机的温度状态,直观查看是否存在过热关节。
3D 姿态
通过数字孪生实时查看机器人关节与底盘的三维姿态。
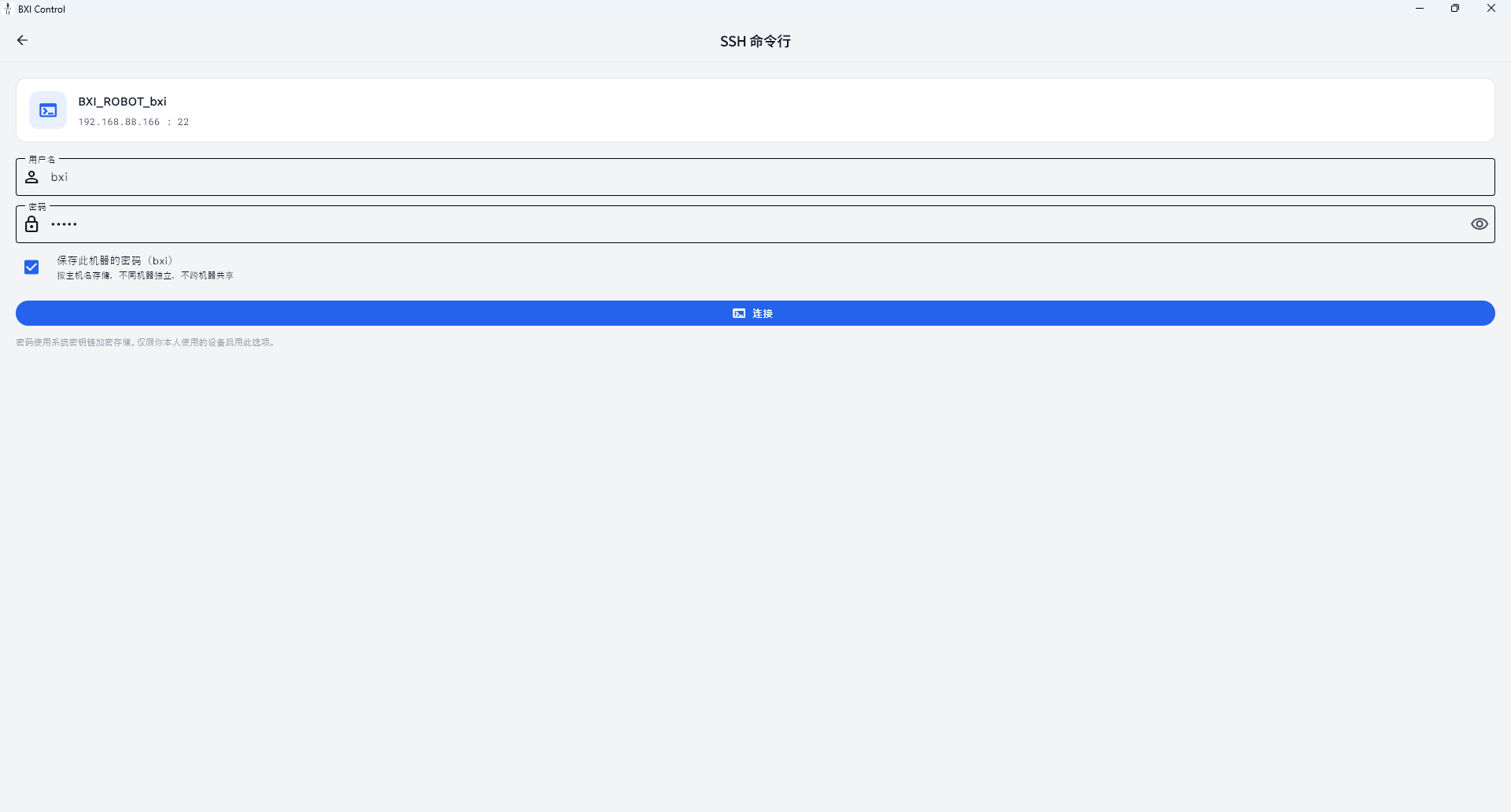
命令行
通过 SSH 登录机器人,直接在终端执行命令,适合调试与排障。
多域访问
诊断界面支持切换访问机器人上不同的 ROS2 域,无需重新连接。
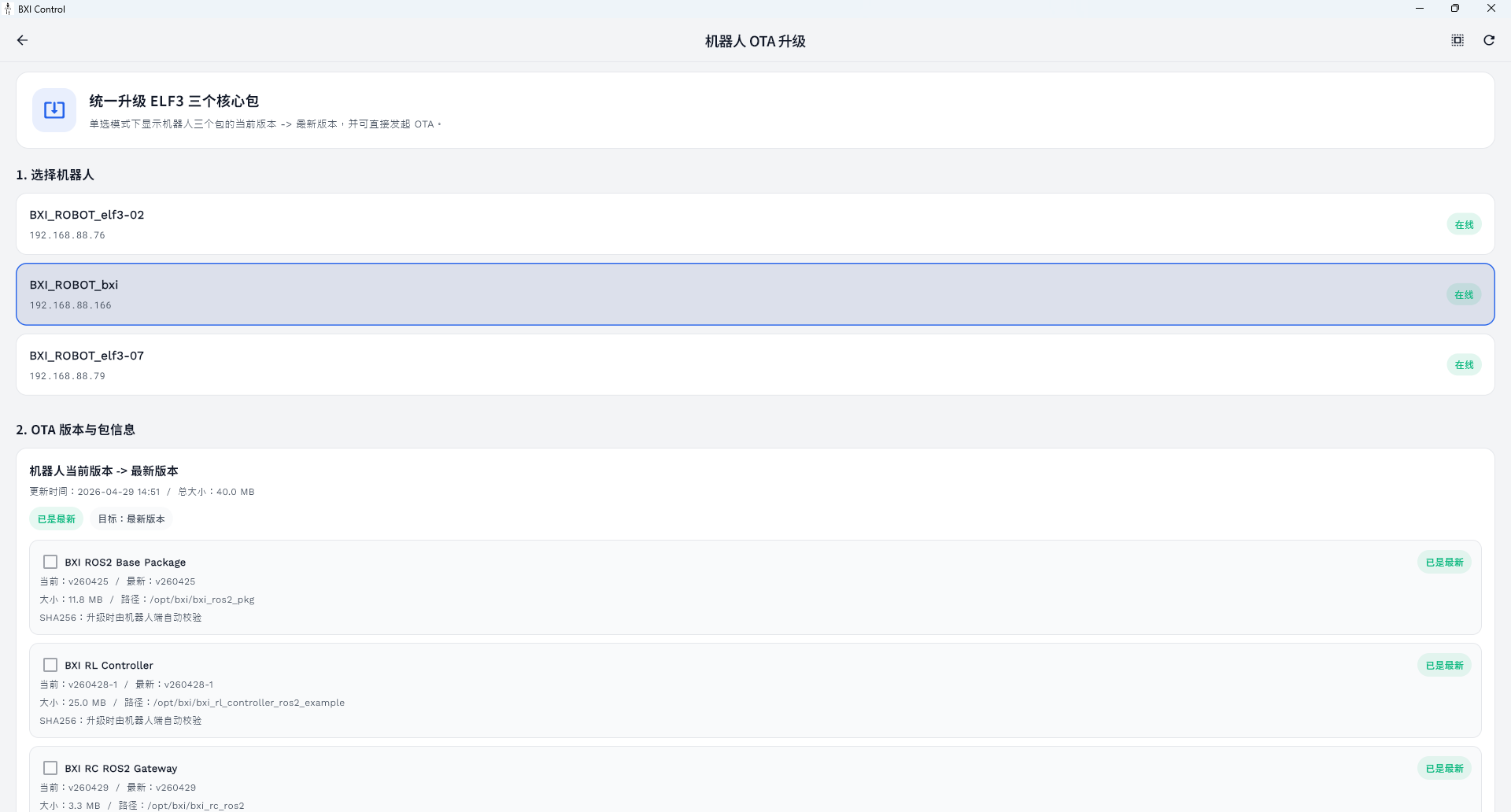
固件升级 (OTA)
在 "我的" 标签页中,点击 "固件升级" 进入 OTA 界面。
操作步骤:
- 选择要升级的机器人(支持批量选择多台);
- 应用自动从机器人获取当前固件版本信息及可用升级包列表;
- 勾选需要升级的软件包;
- 点击 "开始升级",等待进度完成。
升级注意事项
- 升级过程中请保持网络连接稳定,勿断开与机器人的连接;
- 升级期间机器人将暂停控制服务;
- 升级完成后机器人会自动重启相关服务。
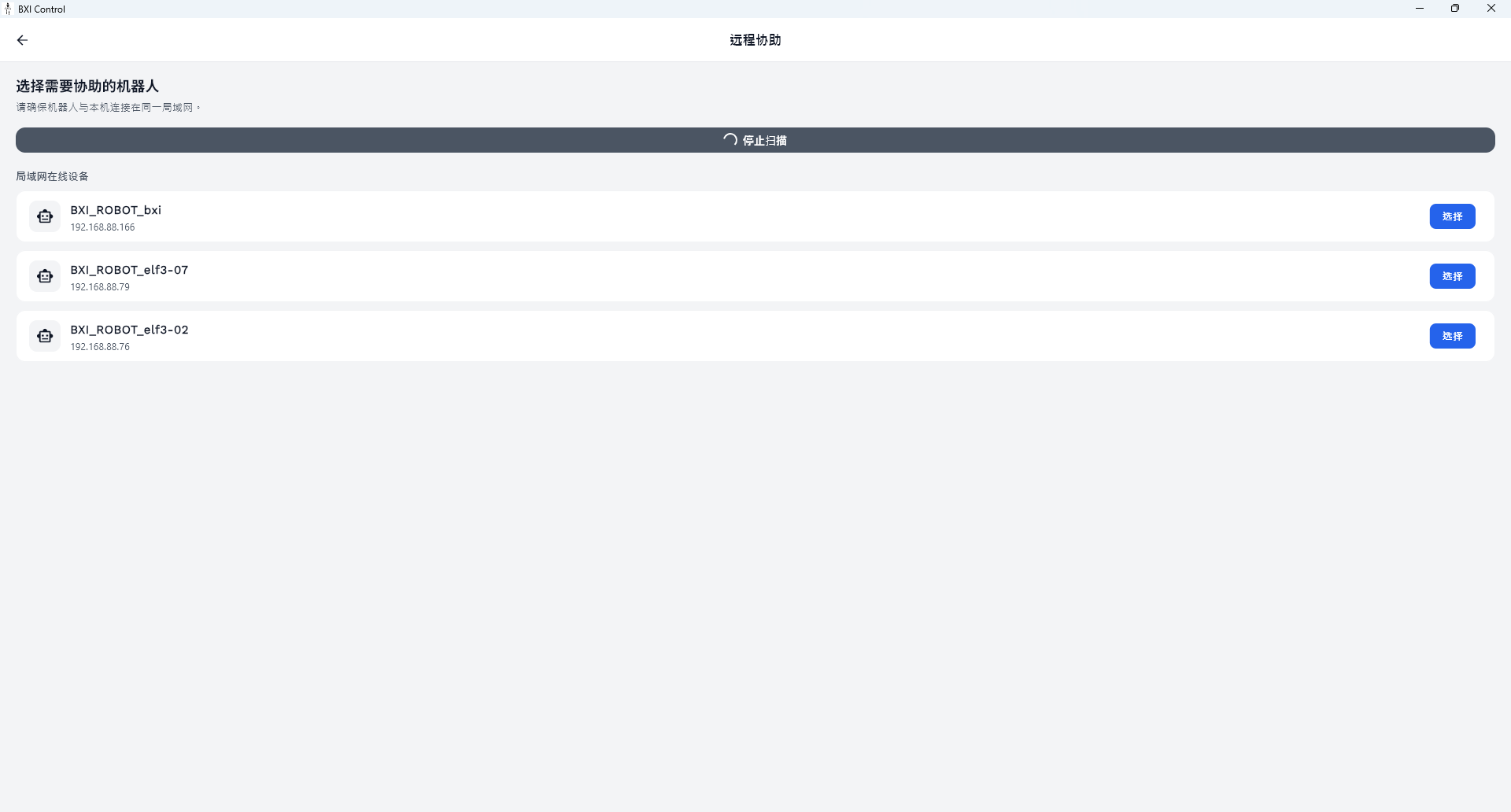
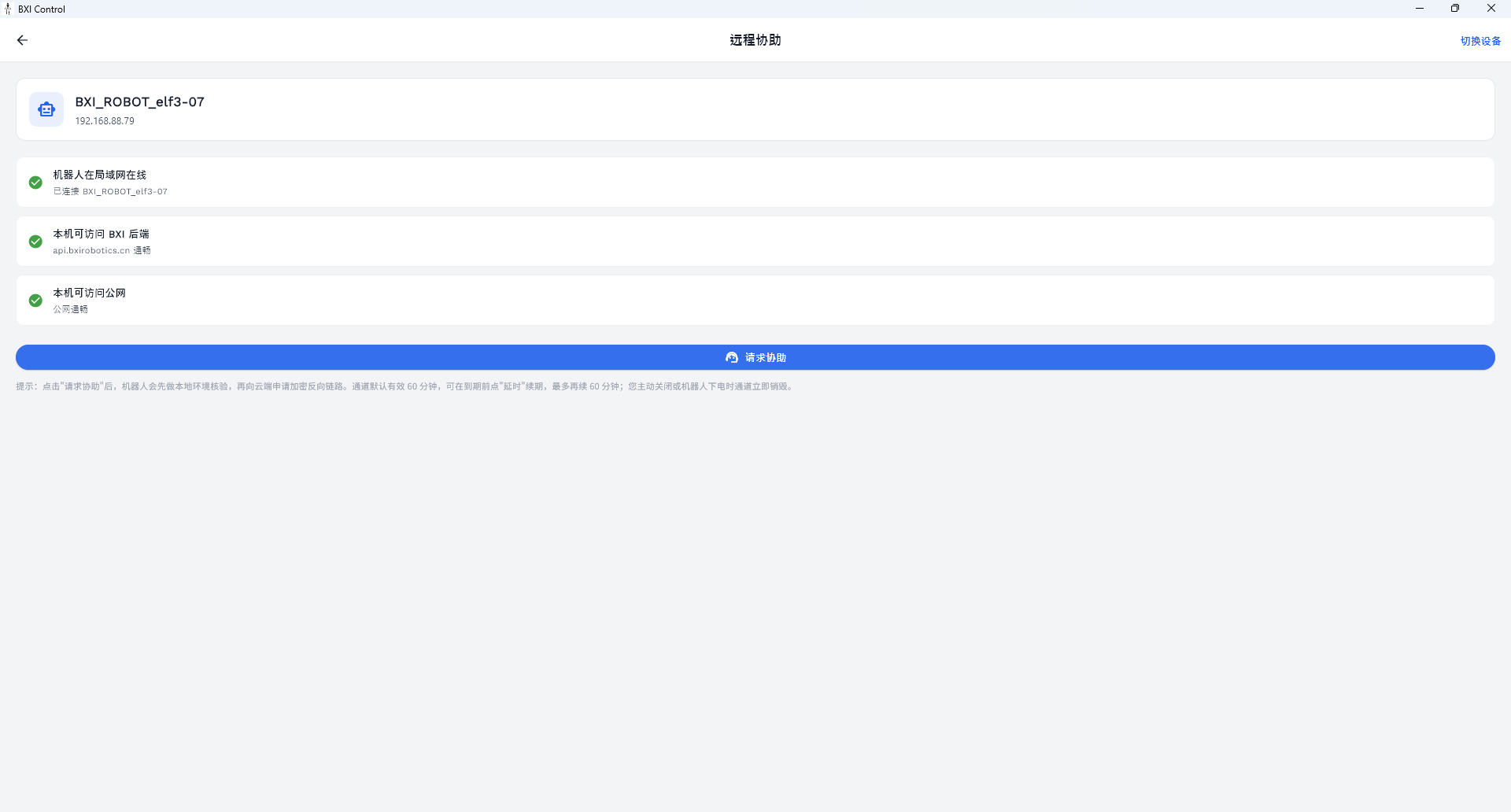
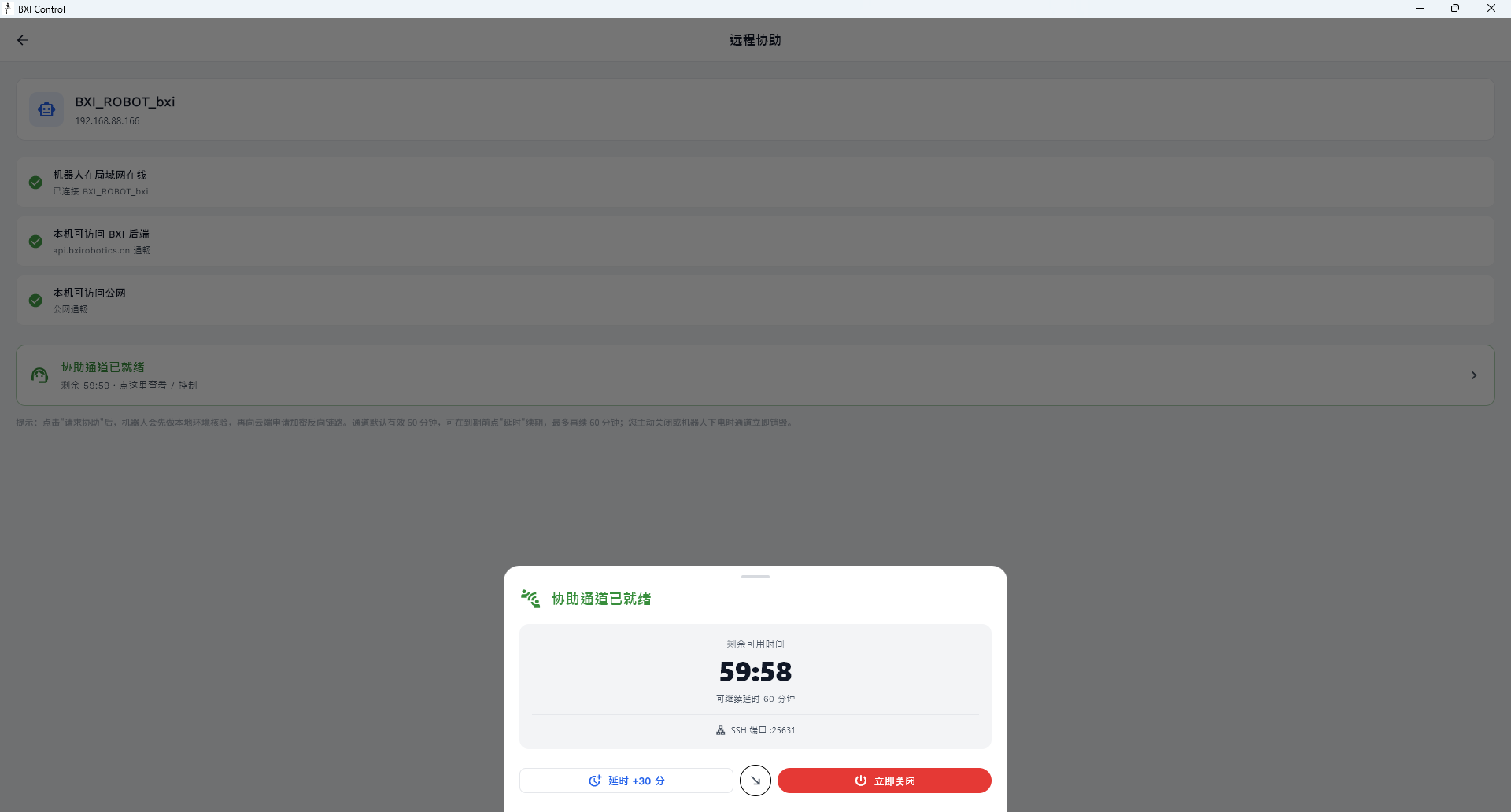
远程协助
在 "我的" 标签页中,点击 "远程协助" 可开启工程师远程接入会话,便于在出现问题时由专业人员远程排查机器人状态。
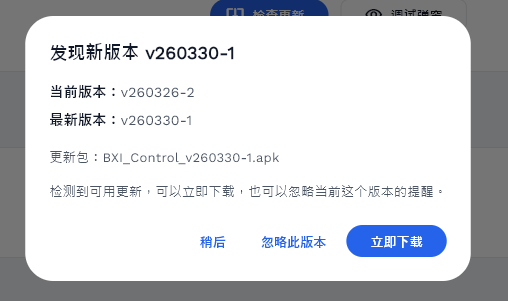
应用更新
应用启动时自动检查新版本(download.bxirobotics.cn,每 5 分钟缓存一次)。若检测到新版本,将弹出更新提示:
- 点击 "立即更新" 下载并安装新版 APK(Android);
- 若自动安装失败,可点击 "手动下载" 通过浏览器下载。