BXI5014-19 Joint Motor
BXI Hollow Planetary Series — Motor Specifications
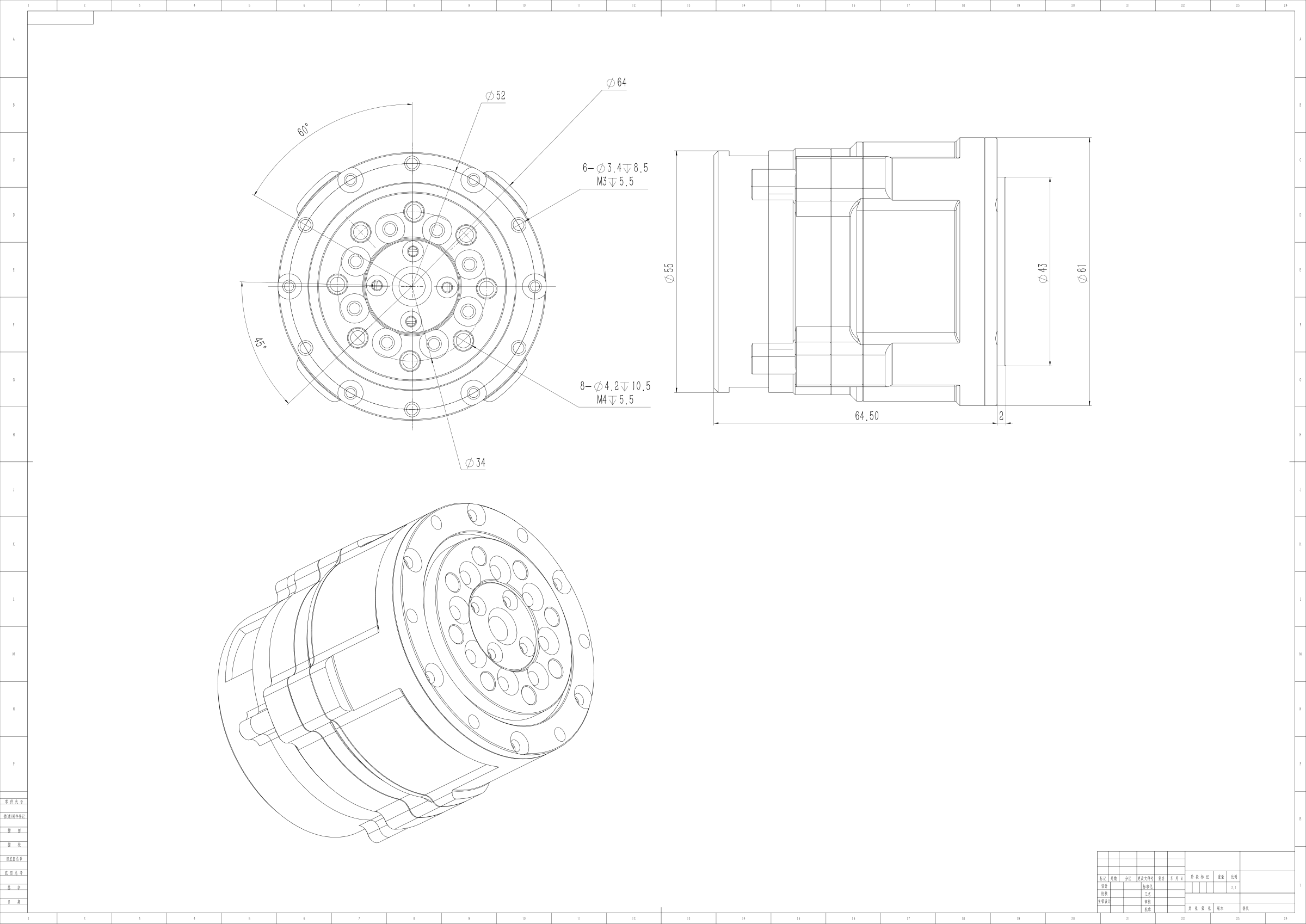
Engineering Drawing
- Mounting OD: 64.00 mm
- Height: 66.50 mm
- Hollow Bore: 6 mm
Specifications
| Parameter | Value | Unit |
|---|---|---|
| Rated Voltage | 24–48 | V |
| No-load Speed | 200 | RPM |
| Rated Output Speed | 100 | RPM |
| Rated Torque | 7 | Nm |
| Peak Torque | 25 | Nm |
| Peak Phase Current | 30 | A(rms) |
| Gear Ratio | 19.5 | — |
| Moment of Inertia | 0.00424198 | kg·m² |
| Weight | 0.5 | kg |
Note: All parameters above are theoretical values and may vary under actual operating conditions.
Interface & Sensor Definitions
| Item | Specification |
|---|---|
| Communication | CAN / CANFD |
| Protocol | MIT Protocol Compatible |
| Control Mode | Mixed Torque / Velocity / Position |
| Bearing Type | Cross Roller Bearing |
| Dual Absolute Encoder | Supported |
| Input Encoder | Magnetic Encoder |
| Output Encoder | Inductive Encoder |
Performance Curves
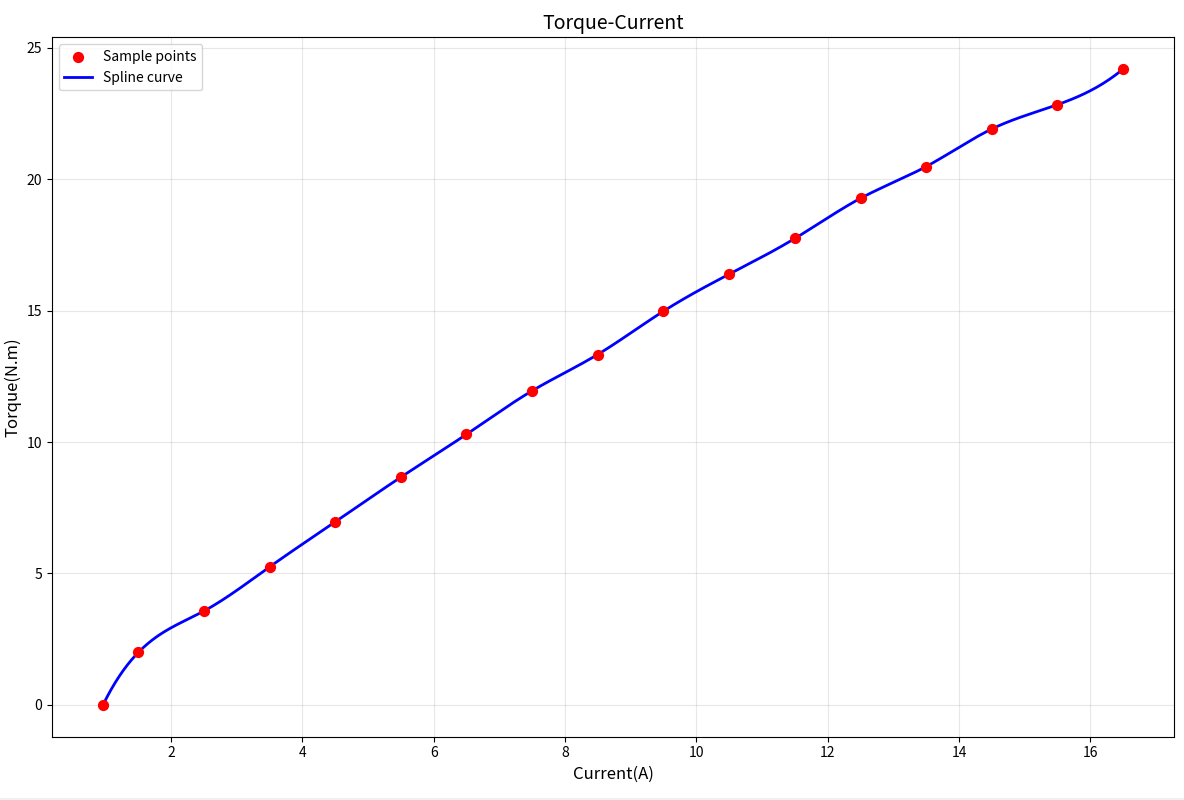
Torque–Current Curve
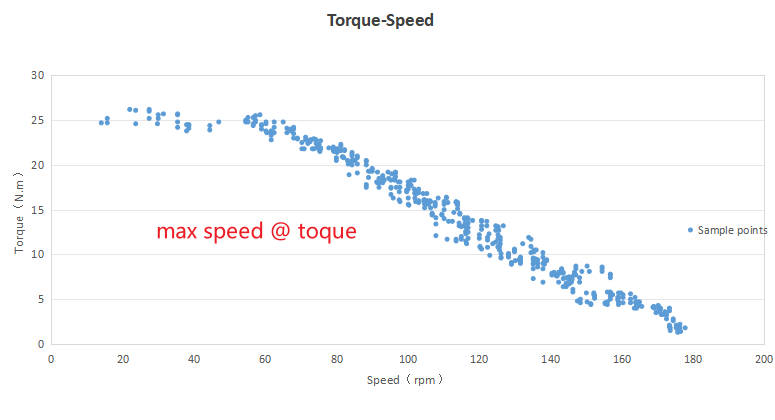
Torque–Speed Curve
Specifications may be updated or revised. For more information, visit www.bxirobotics.cn or contact contact@bxirobotics.com.