操作指南
本文档包含 精灵3 ELF3 机器人的开箱、基础操作、安全注意事项及二次开发相关说明。
在操作机器人之前请务必阅读并遵守《机器人安全须知及安全准则》
开箱说明
-
摆放与取出:正面朝上开箱,移除四周泡沫,至少两人配合抬出机器人。
- 取出过程中一定注意线缆位置,避免压折或扯断。
- 取出后,建议使用支架吊起机器人;或以平躺姿势放在平的地面上。
-
背板结构介绍:
- 下图为机器人背板结构((待补充背板及充电口实物图))。
- 上侧显示屏:为电压、参考电量和温度显示屏。按动显示屏右侧按钮亮屏,10秒后自动熄灭。
- 电压值是判断电池状态的主要依据;屏幕上的电量百分比 / 电量格仅作参考,可能与实际剩余电量不一致。
- 右下方:为整机电池的开关按钮。
- 身体上方:为充电接口。
-
主机系统信息:
- 机器人的主机操作系统为 Ubuntu 22。
- Username:
bxi - Password:
联系供应商获取
开机运行步骤
1. 打开电池电源 & 主机开机
- 按电池电源按钮,电池正常供电,同时主机也会随之开机。此时请查看背板显示屏的电压值,电量百分比 / 电量格可能不准,以电压值为准。
- 电压说明:
- 58V 新机器:背板显示屏显示的是电池组当前电压。充满电时,电压约 58V–60V;随着使用时间增加,电压会逐步下降。若电压明显偏低(低于 50V),请先停止操作并充电。
- 48V 老机器:背板显示屏显示的是电池组当前电压。充满电时,电压约 48V–50V;随着使用时间增加,电压会逐步下降。若电压明显偏低(低于 40V),请先停止操作并充电。
充电说明
充电器支持 42V–88V 的充电电压范围。如需调节充电电压,可长按旋钮 20 秒进入调节模式。
验证充电器输出电压:可直接将充电器接上电源(不接机器人),检查充电器显示电压是否在供应商指定范围内:
- 48V 电池的老机器:推荐范围为 48V–51V。若超出此范围,请先调节后再连接机器人充电。
- 58V 电池的新机器:推荐范围为 58V–61V。若超出此范围,请先调节后再连接机器人充电。
注意:电量百分比 / 电量格显示可能不准确,开机和运动前请优先以电压值判断电池状态。
| 机器人背板充电口 | 充电器示意图 |
|---|---|
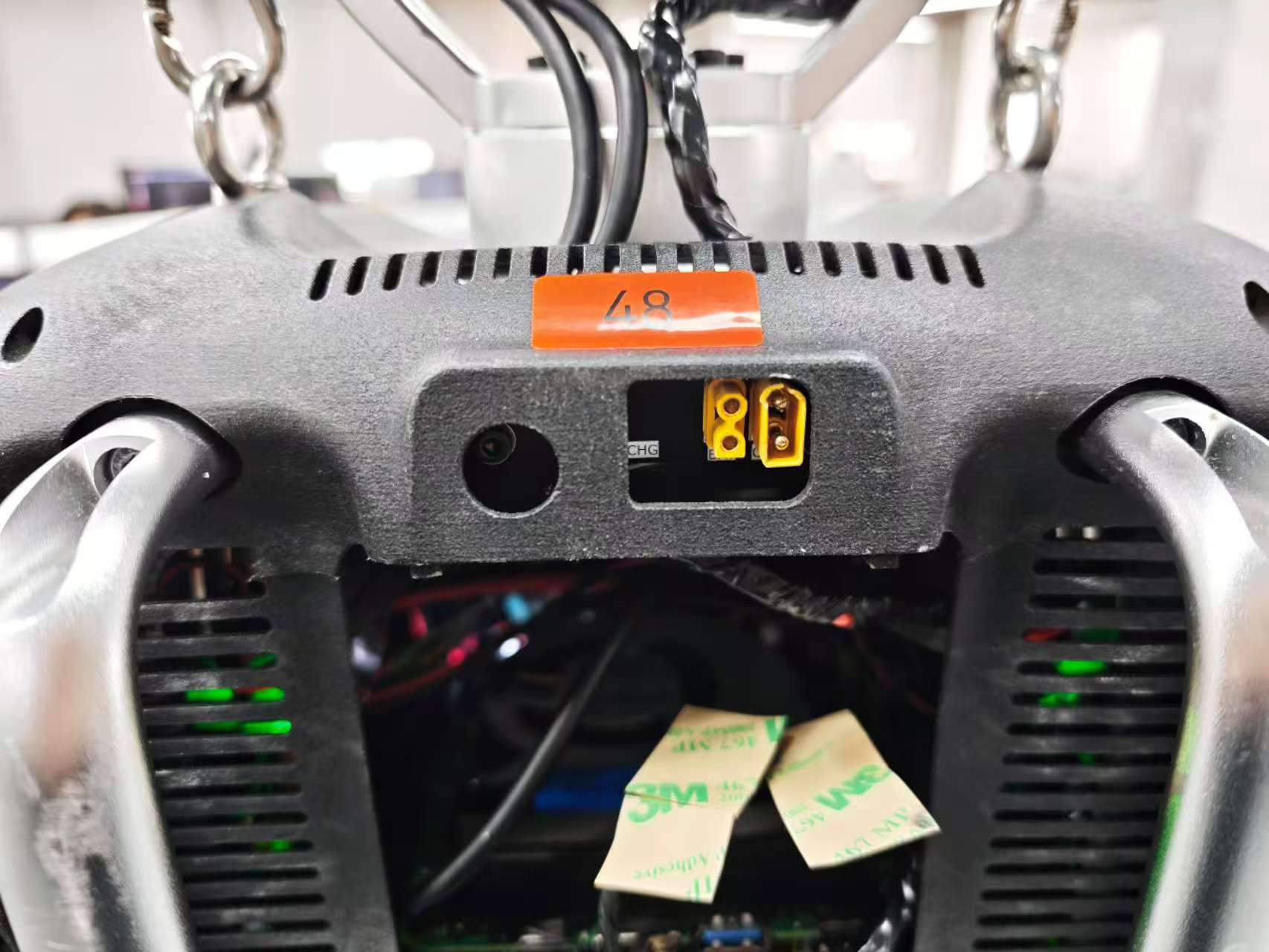 |  |
2. 连接遥控器手柄
将遥控器手柄和机器人 PC 机通过蓝牙连接。手柄出厂时已提前配对好。 - 直接长按 Xbox 按钮。 - 等待按钮下方指示灯常亮,即代表手柄和机器人 PC 机连接成功。
3. 运行控制程序
详细观看操作说明视频。
机器人自带的控制程序有若干模式:走路、零力矩、初始姿态、零位、高速奔跑、中速奔跑、跳舞、起身、前空翻 (不带假手运行) 、鼓掌、挥手等,并会持续更新。
重要:机器人起身运动前准备
- 为了防止意外摔落,确保机器人通过挂绳挂在龙门架、或坐在椅子上、或正坐在地上。强烈建议使用吊架,并将机器人悬挂到合适高度。
- 移除机身所有电线(例如充电头等),以防止在运动时发生拉扯;
- 确保电池电压充足(以背板显示屏的电压值为准,55V以上为宜,不以电量百分比 / 电量格为准),以避免机器人因电池功率不足无法完成某些动作造成的摔落;
- 运行过程中一定注意安全,机器人运动范围禁止有人,避免机器人的关节挥舞击中身体;
3.1 启动程序
重要:切换初始姿态前检查
- 确保机器人的四肢未处于切换初始姿态时可能堵转的姿态。
(建议此时仍处于吊装状态):机器人开机后,等待约 30 秒,待系统启动完成后,向下点按右摇杆 (RS/R3) 启动机器人。观察机器人胸前灯,灯亮表明控制程序已经开始运行。此时默认进入零力矩模式。胸前灯亮起后,等待约 10 秒 完成自检,再控制机器人切换初始姿态、走路等模式。
3.2 初始姿态初始化
(建议此时仍处于吊装状态): - 同时按 RB + B,使机器人进入初始姿态。 - 检测机器人是否正常:简单观察各电机是否有异常(例如没有反应或发出异响等)。 - 将机器人站起:若一切正常,在此状态下将机器人站立起,双脚接触地面。操作人员应协助保持机器人初始姿态站立状态,避免外力破坏姿态初始化。
3.3 切换到运动状态
(此步骤初始姿态初始化已完成,最好仍处于吊装状态,切换成功并稳定后可以放开吊绳): - 走路状态:同时按 RB + X。机器人进入走路状态,此时可以在平地上全向移动。
停机与失能
4.1 终止停机 (失能按键)
- 按start,控制程序会自动退出,机器人电机将立即失能 (掉电),机器人将因为重力自然摔倒。 > 注意:正常停机前,应该将椅子放置于机器人下方,或将机器人挂到龙门架/吊架上,确保机器人失能后不会重摔在地。
- 再次启动:需要回到第 3.1 节重新启动程序。
手柄运动按键说明

遥控器电源指示灯颜色说明:常亮表示连接成功。白色表示 2.4G 无线连接,蓝色表示蓝牙连接,绿色表示 USB 有线连接;电池指示灯红色闪烁表示电量低。
遥控器档位切换说明:模式拨动开关位于遥控器底部/背面、USB-C 接口附近,共有 USB、BT、RF 三个档位。
USB:USB 有线连接模式,使用 USB-C 数据线连接 PC。BT:蓝牙连接模式,用于通过蓝牙连接机器人 PC。RF:2.4G 无线连接模式,需配合 2.4G USB 接收器使用。2.4G USB 接收器默认位于遥控器盒内。

移动方向控制
在走路、高速奔跑和中速奔跑状态下,可使用以下输入控制机器人移动:
| 键位 | 操作 | 控制效果 |
|---|---|---|
| 右摇杆 | 向前或向后推动 | 前进 / 后退 |
| 左摇杆 | 向左或向右推动 | 左平移 / 右平移 |
| 方向键 | 按下 ← 或 → | 左旋转 / 右旋转 |
速度说明
机器人运动速度与摇杆推动幅度有关:摇杆推动幅度越大,速度越快;推动幅度越小,速度越慢。
| 模式等级 | 模式名称 | 按键组合 | 可切换的模式 | 备注 |
|---|---|---|---|---|
| 普通 | 走路 | RB + X | (除起身之外)所有模式 | 全向运动,一定的避障能力 |
| 普通 | 零力矩 | RB + A | 初始姿态 / 零位 | 关节无力矩输出,可随意转动 |
| 普通 | 初始姿态 | RB + B | 走路 / 零力矩 / 零位 / 起身 | 关节固定在初始姿态 |
| 普通 | 零位 | RB + Y | 初始姿态 / 零力矩 | 所有关节保持在零位 |
| 进阶 | 跳舞 | LB + X | 走路 / 零力矩 / 单按“X”键暂停或继续 | 结束后自动切回走路;暂停时机器人会移动来保持平衡(请确保机器人周围1米范围内没有障碍物) |
| 进阶 | 起身 | LB + A | 零力矩 | 需机器人趴着或躺在地上时切换;起身后自动切回走路(请确保机器人周围1米范围内没有障碍物) |
| 进阶 | 高速奔跑 | LB + Y | 走路 | 最高约 4 m/s,没有越障能力 |
| 进阶 | 中速奔跑 | LB + B | 走路 | 最高约 2 m/s,没有越障能力 |
| 进阶 | 前空翻 | LT + Y | 零力矩 | 需要前方 3 米范围内无障碍物;完成后自动切回走路 (不带假手运行) |
| 普通 | 鼓掌 | RT + B | 走路 / 单按“X”键暂停或继续 | 完成后自动切回走路 |
| 普通 | 挥手 | RT + A | 走路 / 单按“X”键暂停或继续 | 不会自动回到走路 |
新手操作建议
首次操作时由于对机器人不熟悉,建议全程用手牵住机器人身上的挂绳,防止机器人在遇到障碍物或发生误操作时摔倒受损。操作之前务必熟悉遥控器按键位置。在机器人运行过程中若有任何异常,请及时按停止按钮,避免对人员、周围物体和机器人本身造成损坏。
使用自定义程序 (SDK) 控制机器人
本条适用于不使用预制程序及遥控器手柄,希望通过自定义算法、ROS 等程序控制机器人运动的开发者。
机器上的运行环境以及底层程序已经准备好,完全支持“开箱即用”。 - 配套 SDK 与 ROS2 示例链接: https://github.com/bxirobotics/bxi_rl_controller_ros2_example
装箱与运输说明
【补充:此处待插入装箱指导图片】
在闲置打包或运输时,请务必注意以下几点: - 避免限位:尽量使关节不要处于机械死区或极端的限位位置。 - 隔离保护:通过塞入原厂的泡沫缓冲件,避免金属壳体(特别是两个电机壳体之间)发生直接接触。以免在长途运输过程中因颠簸造成硬碰撞与壳体变形,进而引发内部电气故障。