控制系统架构
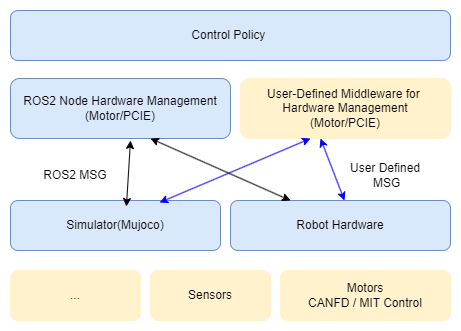
半醒提供全栈开放架构:
- 基于CANFD的电机硬件控制|调试接口;
- 基于Mujoco的仿真环境、机器人URDF/xml等;
- 基于ROS2的硬件管理节点,控制策略无缝部署到仿真/真机硬件;
- 基于强化学习的运控控制训练示例代码;
CAN 总线与 CAN ID
机器人全身共有 31 个关节电机,分布在 5 路 CANFD 总线上。每路总线对应一个身体部位:
| CAN 总线 | 接口名称 | 对应部位 | 电机数量 |
|---|---|---|---|
| 0 | CANFD_0 | 腰部 / 颈部 Waist & Neck | 5 |
| 1 | CANFD_1 | 左腿 L_leg | 6 |
| 2 | CANFD_2 | 右腿 R_leg | 6 |
| 3 | CANFD_3 | 左臂 L_arm | 7 |
| 4 | CANFD_4 | 右臂 R_arm | 7 |
下图为机器人 URDF 可视化模型,图上标注了各关节索引:
【补充:此处待插入标注关节索引的 URDF 可视化图片】
下表给出每个电机的关节索引、关节名称、CAN 总线与 CAN ID。其中:
- 关节索引即控制程序中关节/电机数组的索引,从
0开始全身连续编号; - CAN ID 为电机在所属总线上的地址,在每条总线内独立从
1开始递增。
| 关节索引 | 关节名称 | CAN 总线 | CAN ID |
|---|---|---|---|
| 0 | waist_y_joint | 0 | 1 |
| 1 | waist_x_joint | 0 | 2 |
| 2 | waist_z_joint | 0 | 3 |
| 3 | l_hip_y_joint | 1 | 1 |
| 4 | l_hip_x_joint | 1 | 2 |
| 5 | l_hip_z_joint | 1 | 3 |
| 6 | l_knee_y_joint | 1 | 4 |
| 7 | l_ankle_y_joint | 1 | 5 |
| 8 | l_ankle_x_joint | 1 | 6 |
| 9 | r_hip_y_joint | 2 | 1 |
| 10 | r_hip_x_joint | 2 | 2 |
| 11 | r_hip_z_joint | 2 | 3 |
| 12 | r_knee_y_joint | 2 | 4 |
| 13 | r_ankle_y_joint | 2 | 5 |
| 14 | r_ankle_x_joint | 2 | 6 |
| 15 | l_shoulder_y_joint | 3 | 1 |
| 16 | l_shoulder_x_joint | 3 | 2 |
| 17 | l_shoulder_z_joint | 3 | 3 |
| 18 | l_elbow_y_joint | 3 | 4 |
| 19 | l_wrist_x_joint | 3 | 5 |
| 20 | l_wrist_y_joint | 3 | 6 |
| 21 | l_wrist_z_joint | 3 | 7 |
| 22 | r_shoulder_y_joint | 4 | 1 |
| 23 | r_shoulder_x_joint | 4 | 2 |
| 24 | r_shoulder_z_joint | 4 | 3 |
| 25 | r_elbow_y_joint | 4 | 4 |
| 26 | r_wrist_x_joint | 4 | 5 |
| 27 | r_wrist_y_joint | 4 | 6 |
| 28 | r_wrist_z_joint | 4 | 7 |
| 29 | neck_z_joint | 0 | 4 |
| 30 | neck_y_joint | 0 | 5 |
Domain ID
作用
机器人控制系统基于 ROS2 构建,ROS2 底层采用 DDS 进行节点通信。ROS_DOMAIN_ID 用于划分通信域:
- 处于相同 Domain ID 的节点可以相互发现并收发话题/服务;
- 处于不同 Domain ID 的节点彼此隔离,互不干扰。
当同一局域网内存在多台机器人,或同时连接多台调试主机时,如果它们使用相同的 Domain ID,话题数据会相互串扰,导致控制异常。为每台机器人分配独立的 Domain ID,即可将各机器人的 ROS2 通信网络相互隔离。
默认 Domain ID
机器人出厂已按以下规则配置默认 Domain ID,启动方式不同取值不同:
- 手柄启动:
ROS_DOMAIN_ID = 机器人代数 × 10 + 机器人序号。 ELF3 为第三代产品,代数为3,因此 Domain ID 为30 + 序号。- 例:
elf3-15→3 × 10 + 15 = 45 - 例:
elf3-20→3 × 10 + 20 = 50
- 例:
- APP 启动:
ROS_DOMAIN_ID固定为22。
设置方法
Domain ID 通过环境变量设置。在机器人主机或开发主机的终端中执行:
export ROS_DOMAIN_ID=45
如需开机自动生效,可将上述命令写入 ~/.bashrc:
echo "export ROS_DOMAIN_ID=45" >> ~/.bashrc
source ~/.bashrc
提示
ROS_DOMAIN_ID取值建议范围为0–101。- 上位机(开发主机)需与目标机器人设置相同的 Domain ID 才能与其通信。
- 修改后需重新启动相关 ROS2 节点才能生效。
文档目录
- 基于ROS2的控制策略部署框架,无缝部署到仿真/真机硬件:https://github.com/bxirobotics/bxi_rl_controller_ros2_example
- 机器人URDF:https://github.com/bxirobotics/bxi_rl_controller_ros2_example/tree/main/resources